
发布日期:2022-10-22 点击率:29
车主在充电时可能面临的一些挑战包括道路上电量耗尽、没有足够的时间在家充电以及难以在道路上找到充电站。为了解决这一挑战,研华的合作伙伴Alsontech致力于机器人解决方案,采用研华的边缘工业计算机,该计算机具有高稳定性、高性能和紧凑的尺寸,以创建一种车辆快速充电的解决方案:3D视觉引导机器人。
3D视觉引导机器人为用户提供了经济灵活的充电选择,将“寻找充电桩的汽车”变成“招手的充电桩”。现在,任何停车位都可以变成充电桩。汽车驶入无人充电站后,驾驶员无需下车。机器人站在充电站旁,它的“眼睛”“可以帮助准确定位充电端口,引导充电插头自动快速充电。机器人甚至可以在充电结束后自动关闭充电盖。整个过程只需几分钟,因此可以在前一辆车完成后立即为下一辆车充电。
3D视觉引导机器人由机器视觉系统、自动引导车(AGV)系统、驱动电机、电池、工业PC、三维定位传感器(双目摄像机)、激光雷达、开关、4G/5G网络模块、扬声器和其他组件组成。由于机器人主要使用USB 3.0连接摄像机以完成引导和图像捕获,因此为其提供可锁定、小尺寸、高性能、高度可靠的边缘解决方案非常重要。
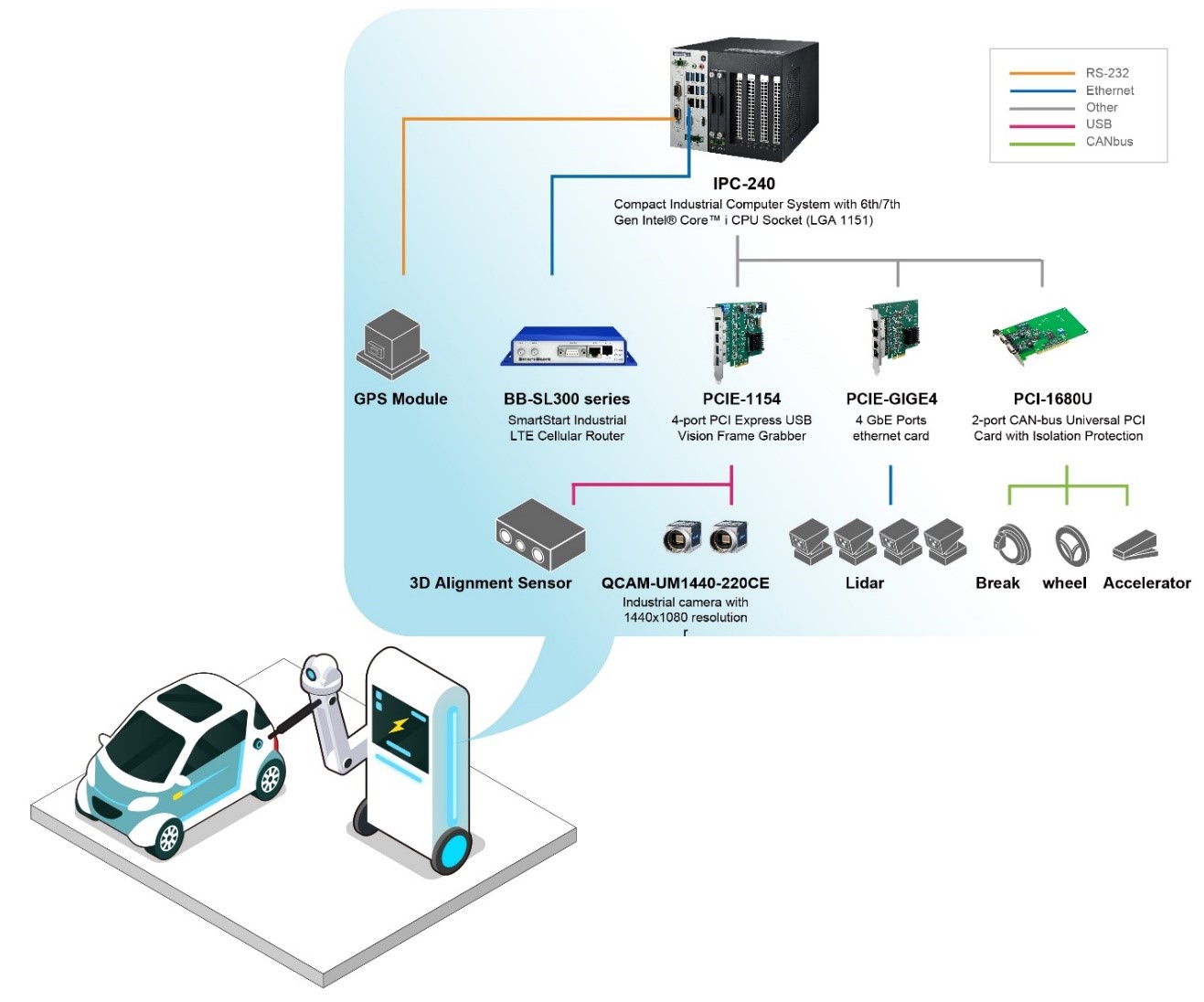
3D视觉引导机器人需要执行自主识别(人脸识别、行为分析)、网络通信和视觉定位等任务。驾驶时,网络模块用于获取精确的位置和地图,周围的工业摄像头用于获取环境数据。激光雷达测量距离,检测障碍物,并在接近电动汽车时寻找充电口。它还使用双目摄像机精确定位和控制机器人充电。
该机器人使用研华的IPC-240紧凑型工业计算机系统作为关键控制器。该系统有一个带有多个输入/输出和PCIe/PCI卡扩展插槽的面板,可根据客户应用进行高度调整,集成了图像采集(USB)、通信(LAN)和总线控制。其紧凑的尺寸和稳定的工业控制设计使其易于安装在机器人上。
对于视觉应用,机器人使用配备独立USB 3.0端口的PCIE-1154(4端口USB帧采集卡),用于摄像机接口,具有独立的带宽,以确保稳定的数据传输而不会出现帧丢失,以及可锁定的设计,以确保可靠的电缆连接。此外,带有Intel®网络控制器i210适配器的PCE-GIGE4扩展卡连接到激光雷达,实现快速数据传输。PCI-1680U控制卡有助于控制机器人的运动,包括制动、改变方向和加速。对于工业通信,连接外部Advantech BB-SL300系列路由器,该路由器支持LTE全网通。
凭借研华在全球的支持网络,及时提供维修和咨询服务,从而提高整体解决方案的稳定性,赢得客户的信任。
下一篇: 城市碳中和目标:研华
上一篇: 第8代Intel处理器平台


