发布日期:2022-10-09 点击率:238
摘要:本文介绍了台达自动化产品在高速枕式包装机中的系统解决方案,尤其是台达ASD-A2智能型伺服驱动器内建的电子凸轮,高速脉冲抓取、比较,以及参数自行写入功能的在系统方案中的应用,以及电子凸轮曲线的设计规划。台达A2智能型伺服在枕式包装机的应用,使得国内糖果包装机的速度得到了很大的提升,经实际生产测试,可实现每分钟1200包的速度,这一成功应用证明台达在包装业已有了成熟的解决方案,同时也说明国内糖果包装技术跨入了一个更高的水平。
关键词:电子凸轮 飞剪 同步抓取修正轴 高速抓取 ASD-A2
枕式包装机是一种卧式三面封口,自动完成制袋、填充、封口、切断、成品排除等工序的包装设备,实际应用中,与相应衍生机种、辅助机种相配合,能实现食品、日用化工、医药等行业自动化生产线的流水包装。枕式糖果包装机主要用于圆形或方形奶糖的包装。
传统的枕式包装机横封刀的运动曲线是由机械的凸轮来实现的,机械加工、安装复杂,运行噪音大,效率低;由于机械的局限性,其包装速度仅能达到600颗/分钟,随着行业竞争的日益激烈,以及人力成本的增加,包装设备自动化程度以及包装速度要求越来越高。要实现高速包装,整个控制系统的响应和处理速度要求更加苛刻,传统的控制器已经难以满足要求,以往包装裁切所使用继续诶凸轮必须采用伺服的电子凸轮来替换。台达A2高性能智能伺服控制器除内建电子凸轮功能外,32为高速DSP处理核心,内建高速脉冲抓取、比较,高速运动控制功能,完全可以实现包装设备高速的工艺要求。
针对包装行业所专门开发的飞剪电子凸轮模型,同步抓取修正轴功能内嵌于A2伺服控制器内。功能齐全,编辑简单的伺服编辑软件ASD-A2 SOFT,人性化的接口设计,得心应手的快捷菜单,使得整个系统的设计规划轻而易举,随手可得,大大减少了调机时间。
设备原理
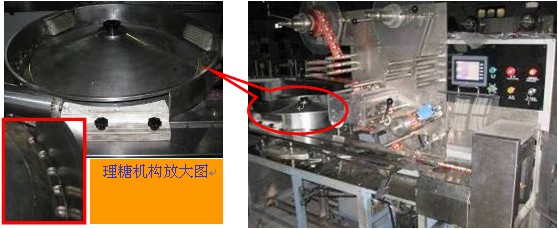
糖果经圆形盘整理后,进入直线链钩机构,被链钩送进包装膜内,然后进行纵封和横封包装,以完成成品裁切。具体结构如图1所示
|
|
图 1 三伺服枕式糖果包装机工艺流程
枕式包装机的送膜作为系统主轴。切刀和送料跟随主轴运作,送料和横切伺服控制器直接抓取膜位色标信号进行位置检测,以确定送料和的位置,薄膜经成型器成型后变为筒膜,并进行纵向热封,同时物料被送进筒膜内,一起向前经过横封横切部位,由回转式的横封横切刀对筒膜进行横向封切,输出包装成品,具体工艺流程图和工艺结构图分别参照图2、图3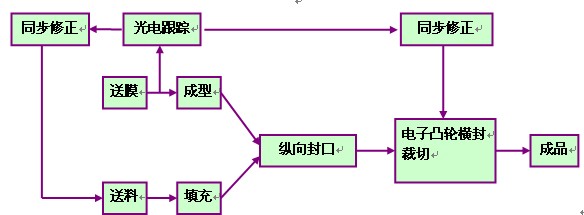
图2.工艺流程图
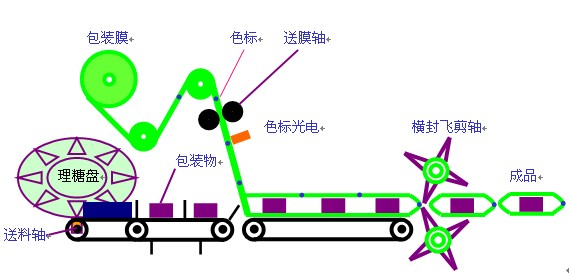
图 3.工艺结构图
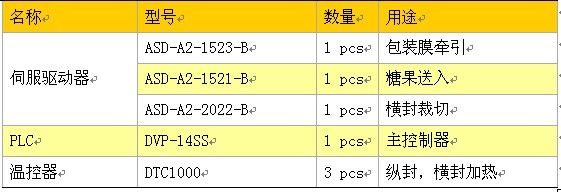
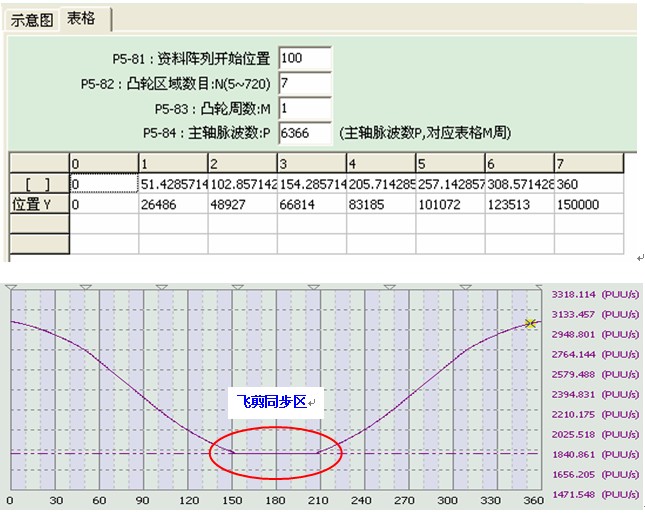
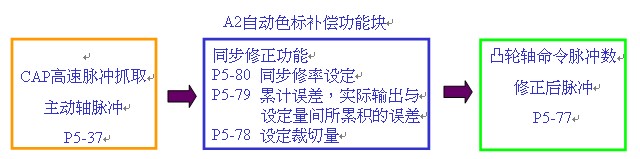
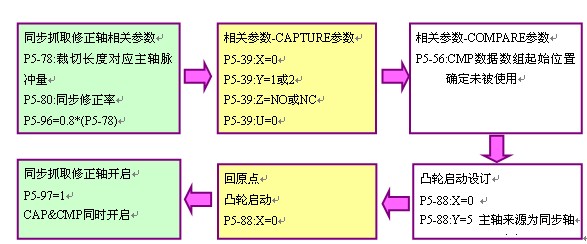
系统配置 图 4.台达系统电气控制图 表1 高速枕式糖果包装机电控配置 系统控制原理 系统电子凸轮规划设计 图 6飞剪电子凸轮模型 图7 台达ASD-A2飞剪凸轮编辑界面 图8 ASD-A2软体产生的飞剪裁切电子凸轮速度曲线 图9 送料轴凸轮曲线位置表格 图10 ASD-A2软体自动建立的链钩电子凸轮曲线 高速枕式糖果包装机伺服色标补偿功能 A2伺服控制器内建同步抓取修正轴功能(即传统的色标自动补偿功能),伺服控制器利用内建的高速脉冲抓取功能,通过色标光电抓取主动轴两次色标间的脉冲数目,与伺服控制器内部用户所设定的理论裁切量(P5-78的设定值)通过compare功能做比较,根据同步修正的修正率(P5-80)对两者之间的误差值(P5-79)做修正,伺服控制器最终依据修正后的脉冲命令(P5-77)运行。其修正原理如图11所示,生产规格(膜长)更换调机时,只需将裁切偏差量通过HMI给伺服控制器,2~3刀之后,便可获得精准的裁切精度,大大减少了试车过程中的包装膜浪费。ASD-A2的同步抓取修正轴参数设定流程如图12所示 图11 A2伺服控制器同步抓取修正轴原理框图 图12 同步抓取修正轴参数设定流程 HMI建立飞剪曲线功能 图14 实际生产中的飞剪轴速度曲线 结语
此系统包括PLC,HMI,伺服以及温度控制模块,由于台达ASDA-A2伺服控制器内含电子凸轮功能,三台伺服即可完成送膜,送料以及裁切工艺,PLC只需做I/O控制,大大节省了上位机的昂贵成本,程序的规划也更加简单,台达解决方案之系统电气控制如图4所示,详细配置如表1所示 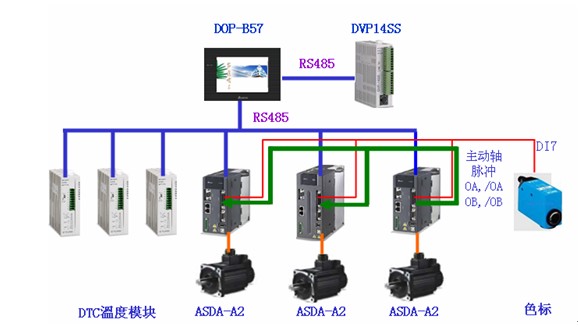
台达系统解决方案,为了满足高速的要求,送膜、送料链钩、切刀三个轴均使用伺服控制,三轴之间的运动控制依据凸轮主从关系完成,整个系统控制方案如图5所示
1.送膜轴(轴3)
此轴采用速度控制,作为整个系统的主轴。下达脉冲命令给切刀轴和送料轴,指挥凸轮轴运转。
2.切刀轴(轴2)
以PR模式(内部位置控制模式)内建的电子凸轮跟随主轴运行,切刀轴接收送膜主轴的脉冲OA,/OA;OB,/OB,以凸轮飞剪曲线跟随主轴运动,当切刀轴伺服控制器检测到色标光电S1信号,凸轮启动运转,在运转过程中,伺服控制器会抓取S1的信号,利用内建的同步抓取修正轴(色标补偿功能),调节凸轮速度,保证精准的裁切位置。
3.送料轴(轴1)
以PR模式(内部位置控制模式)内建的电子凸轮跟随主轴运行,脉冲来源为送膜主轴的OA,/OA;OB,/OB,当检测到色标光电S1,则依据规划好的凸轮曲线跟随主轴运转,并实时抓取S1信号,利用内建同步抓取修正轴进行糖位的自动调节。 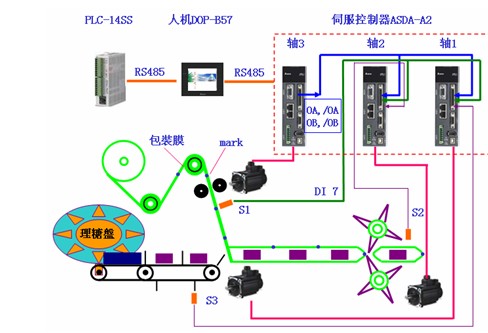
图 5.台达系统控制方案
Delta ASD-A2伺服内建PR(内部位置控制模式)模式,PR模式下,内建64段定位程序,不仅可以实现原点复归,位置控制,定速控制,还具有位置和速度插断,重叠功能,参数写入,定位程序段之间的跳跃和调用,同时具有电子凸轮功能,高速抓取(capture)和比较(compare)功能,所以切刀轴和链钩轴的原点复归
无需上位机的参与,即可完成,其主要pr规划如下 
参数说明:
P5-39=0x0020:CAP轴命令来源:pulse cmd
P5-88=0x0251:凸轮轴主轴来源:同步抓取修正轴
啮合时机:CAP轴任意一点动作
脱离时机:不脱离
P5-97=1:开启宏指令,即同步轴启用
横封切断轴飞剪曲线设计
Delta ASDA-A2伺服控制器内建飞剪凸轮模型,如图6所示;所以使得飞剪电子凸轮曲线的设计简单易行,利用ASD-A2 PC soft所提供的E-CAM EDITOR功能,调试着只需将机械参数输入下图红色方框内的对应位置, ASDA-A2 PC soft将会自动生成飞剪曲线。考虑到不同包装膜的热封难易程度,在裁切区设立同步区。同步区为50°,如图7所示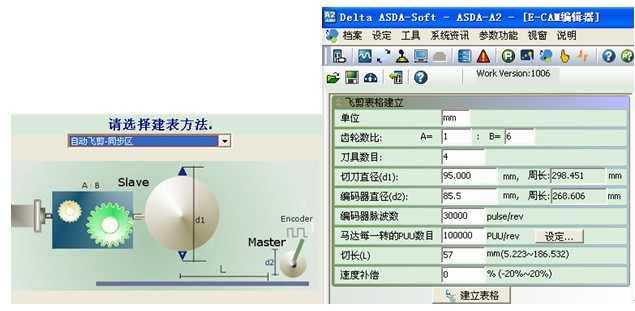
链钩轴电子凸轮曲线设计
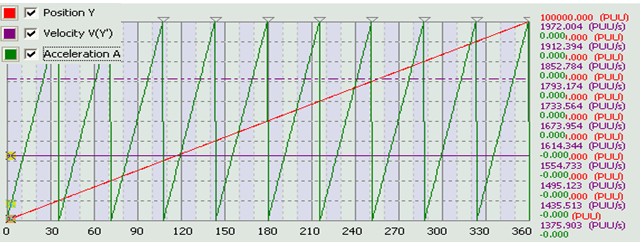
链钩轴用途在于将糖果送入包装膜内,只要与送膜主轴保持位置同步即可,所以其以送膜轴作为主动轴,跟随送膜轴进行同步运转。即送膜轴每送出一个包装长度的脉冲,链钩运行一个链钩的钩距,根据机械结构,链钩轴马达转一圈,链钩走一个链距,而伺服一转对应脉冲为100000puu,所以360°的位置脉冲为100000puu。在规划曲线时,利用Delta ASDA-A2 PC soft所提供的manual create 功能,建立位置的函数表格,如图9所示;ASDA-A2 PC soft便会依据三次曲线自动规划出速度和加速曲线,如图10所示,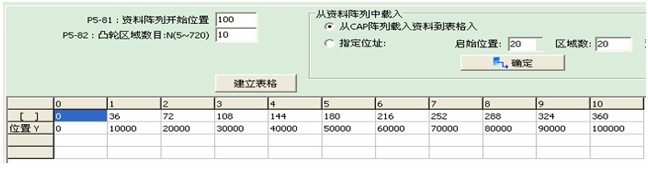
ASD-A2伺服控制器飞剪曲线的建立,除了利用PC软体所提供的ECAM EDITER建立外,还提供更加便捷的曲线建立方式,即HMI飞剪曲线建立功能。其HMI规划如图,用户只需在装机时将设备机械结构参数输入HMI,通过HMI宏指令便可控制伺服控制器实现飞剪曲线的建立,如需生产规格变更,用户只需输入裁切长度,飞剪曲线便可自动变更。
遮没功能
A2伺服控制器内建色标遮没功能,可有效避免包装膜污染,色标错印所引起的光电误动作,增加了整个系统的稳定性。如图13所示;P5-78为裁切长度的脉冲设定值,P5-96为遮没区脉冲长度,此功能设定后,在遮没区域内,即使色标误动作,也不会影响到整个系统的性能。 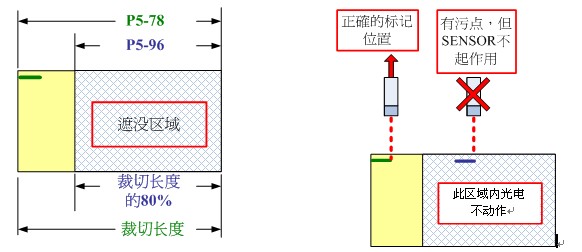
台达A2高性能伺服控制器解决方案的效果
该套高速枕式包装机系统为全电气设计,彻底解决了原有设备机械凸轮长期磨损造成的裁切效果变差,调整复杂的弊病,不仅简化了设备的机械结构,节省了机械的保养成本,使得调机变得更简单。同时改进后的全电气系统,设备稳定性也大大提高。其主要有点如下:
① 包装精度大大提高,裁切精度可达到0.5mm
② 在系统为4把刀时,达到1200包/分;
③ 糖位和切断的机械结构不再需要,使机械结构简单
④ 电子凸轮替代机械凸轮,易于调机和维修,同时减少工作噪音;
⑤ 运动控制具有伺服内部程序完成,大大简化了上位机的控制难度和成本
⑥ 横封飞剪凸轮曲线的建立,无需PC软件,通过HMI即可完成曲线的建立
基于台达ASD-A2高性能伺服控制器的系统设计,伺服控制器内建电子凸轮,同步飞剪,高速同步色标抓取修正轴,以及伺服pr参数写入功能。此系统PLC仅起到I/O控制功能,其它的复杂运动控制运算功能均由伺服完成,大大节省了与上位机的沟通时间,为实现高速包装要求起到了关键的作用。
飞剪、电子凸轮、高速、实时纠偏等功能,是目前很多OEM机械尤其是包装机械行业的高端机型提出的需求,在实现这些功能的同时,能够将原先的生产效率提高2~3倍甚至更多,在不久的将来会成为主流趋势。
台达A2高性能伺服控制器在三伺服高速枕式糖果包机中的成功应用,说明台达在高速包装机行业已经有了很好的应对产品以及系统解决方案。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV