
发布日期:2022-04-17 点击率:46
传统单相桥式逆变器作为一种常见的拓扑结构,在许多领域得到了广泛应用。然而,该拓扑的输出逆变电压幅值必须低于输入直流电压,当应用在输出电压高于输入电压的场合时,须增加一级Boost电路来提高直流电压,这会导致逆变器成本、体积和电路复杂性的增加,同时也降低了其传输效率。为此,参考文献[1-3]提出Z源逆变器,其输出电压可高于或低于直流电源电压,且无桥臂直通问题。但 Z源逆变器是在传统桥式逆变器前加了一个Z源网络,其成本和效率问题依然没能很好地解决。参考文献[4-6]对双Boost逆变器进行研究。双Boost逆变器由两个同步Boost级联而成,这种逆变器的输出电压可高于或低于直流电源电压,因而在实用中有更大的灵活性,同时降低了成本,简化了电路。但是该逆变器的两个Boost需要协调工作,每个Boost的两个开关之间需要加入死区时间,因此控制起来相对复杂,且四个开关都工作在高频状态,开关损耗较大。
本文在双Boost逆变器的基础上提出了一种新型逆变器,该逆变器只需要一个Boost电路和一个换向桥。其输出电压可高于或低于直流电源电压,拓扑结构较双Boost逆变器简单,整个拓扑只有一个开关工作在高频状态减少了开关损耗,且不存在两个Boost控制协调的问题。故其拓扑结构和控制结构都相对双Boost逆变器简单。
滑模控制具有很好的自适应性和较强的鲁棒性,能很好地满足高性能要求的场合[7]。为此本文在提出新型逆变器的基础上,对该逆变器的工作进原理行分析,并对其滑模控制进行了研究。
1 基本工作原理及其等效电路的状态空间方程
新型逆变器及其控制电路如图1 所示。图中L 为电感,C 为电容,uO为输出电压,iC为电容电流,S0~S4
为功率开关管,Ud为直流输入电压,u* 为参考电压,R 为负载阻抗。
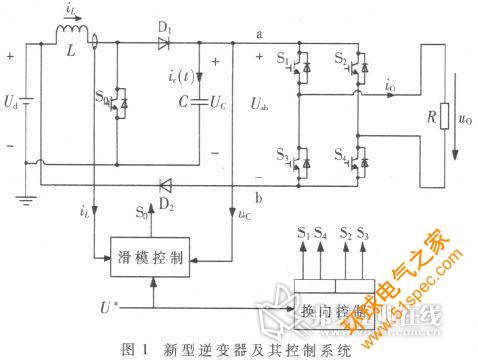
1.1 基本工作原理
该逆变器是由一个Boost 加一个全桥换向电路构成, 换向桥输入端下面一端(b 点) 接在输入电压的正端,
以提供直流偏置电压。定义正弦波取绝对值后的波形叫正幅正弦波。由于Boost 所能产生的最小电压为输入电压Ud,为得到图2中Uab所示正幅正弦波, 参考信号u* 必须在正幅正弦波上叠加一个大小为Ud直流参考信号,这样可以在电容C上产生对应该电压波形Uc。由于b 点电位为Ud, 所以抵消了在Uc上的直流分量Ud, 从而得到如图2 所示Uab的波形。由于Uab的波形为正幅正弦波, 所以要将其变为交流正弦波, 才能得到所需要的输出电压。此时,可以通过S1~S4全桥电路实现不断换向来得到交流输出电压。由图2 可知, 输出应为正半波时,为S1和S4导通。输出应为负半波时,S2和S3导通。可以看出, 换向桥功率开关的频率等于输出电压的频率, 其工作频率十分低,这样使得整个系统只有一个开关S0工作在高频状态, 相对于有4 个高频开关的双Boost 逆变器和Z 源逆变器,新型逆变器的开关损耗得到大大减小, 系统效率相对提高。

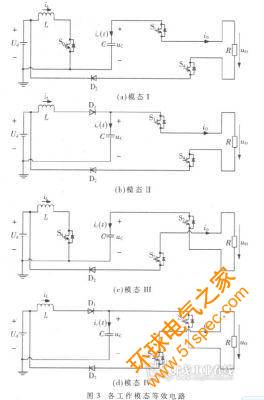
正半波的阶段, 模态I 和模态Ⅱ 不断重复。在输出电压为负半波的阶段, 模态Ⅲ 和模态Ⅳ 不断重复。具体分析如下:
(1) 模态I: 此时由于输出电压为正半波, 故S1 和S4导通, 从而加在电阻上的电压为正。此阶段S0 闭合, 输
入电源给电感L 充电, 负载R 由电容C 供电。
(2) 模态Ⅱ : 此时由于输出电压为正半波, 故S1 和S4 保持导通, 从而使加在电阻上的电压为正。此阶段S0
断开, 电感L 充电给电容C 充电, 同时给负载R 供电。
(3) 模态Ⅲ : 此时由于输出电压为负半波, 故S2 和S3 导通, 从而使加在电阻上的电压为负。此阶段S0 导
通, 输入电源给电感L 充电, 负载R 由电容C 供电。
(4) 模态Ⅳ : 此时由于输出电压为负半波, 故S2 和S3 保持导通, 从而使加在电阻上的电压为负。此阶段S0
断开, 电感L 充电给电容C 充电, 同时给负载R 供电。
1.2 等效电路的状态空间方程
通过对该电路4 个模态的分析, 可以得出滑模控制对象的等效电路, 如图4 所示。由于4 个模态中无论电
阻方向如何变化, 对于前一级Boost 来说, 都相当于一个电阻负载。此外, 由于b 点电位已经被抬升至Ud, 所以Boost 的输出相当于一个电阻串联一个电压源Ud。其控制的目标是要使Uab输出正幅正弦波,所以要控制Boost的输出电压UC与负载电压UO1满足如下关系:
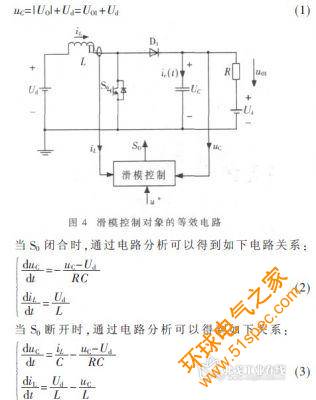
取电容电压和电感电流作为为系统的状态变量来描述系统, 结合上述分析可得等效电路的状态空间方程为:

在图4 所示的Boost 电路中, 电感电流的参考量很难预先给定, 并且实际中电感电流是非线性的。为了克服这个问题, 实际中可以采用一个高通滤波器来获得电感电流的状态变量偏差(iL-iL*)[ 8]。该方法需要注意高通滤波器的截止频率的选择, 要保证高频分量可以顺利地通过, 而电感电流的低频分量能被滤除。
2 仿真研究
为了验证新拓扑及其控制策略的可行性及性能,利用Matlab/Simulink 搭建电路模型进行仿真验证, 参数
设置: 直流输入电压Ud=50 V, 电感L=0.8 mH, 电容C=90 μF, 负载电阻R=10 Ω,输出电压O=100sin(314t)V,
为说明能降压输出仿真了uO=30sin(314t) V 时的情况。图5 表明, 在无输入和输出扰动时, 逆变电源得到
了所设定的输出。可以实现输出电压幅值大于或小于输入电压Ud, 且其波形正弦度好。此时THD=1.34%, 总谐波畸变率小,输出电压质量高。在5 ms 的时候负载电阻从10 Ω 跃变成15 Ω,在25 ms的时候负载电阻从15 Ω 跃变成10 Ω( 即负载扰动时变化量为原来电阻值的50%)。从图6 可以看出负载扰动时, 逆变电源的输出电压几乎不变,这说明滑模控制下的新型逆变器对负载扰动具有很好的抑制能力。本文提出了新型逆变器, 该逆变器拓扑结构简单,采用的元器件少,且其控制设计主要是针对前一级Boost电路的控制设计,因此其控制的设计比较简单。整个拓扑只有一个开关工作在高频状态,从而减小了开关损耗提高了系统效率。为了使该电路获得很好的鲁棒性,在分析其工作原理的基础上,对其滑模控制策略进行了研究。最后进行了仿真验证,仿真结果表明在滑模控制下的新型逆变器对负载扰动具有很好的抑制能力,表现出很好的动态和稳态性能,且输出电压波形谐波含量低,波形质量好,是一种高性能的逆变器。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


