
当前位置: 首页 > 工业控制产品 > 运动控制 > 工业机器人 > 直角坐标型工业机器人
发布日期:2022-04-18 点击率:68
前言
先放一个ROSIndustrial一周年剪辑视频。
ROS已经发布八周年了,在国外科研机构中非常受欢迎。目前,以美国西南研究院为首的几位大佬开始尝试将ROS应用在工业机器人中,上面这个视频就是ROS-I项目一周年的进展情况。
为了说明讲清楚ROS,我就从ROS是什么,为什么使用ROS,如何使用ROS三个方面展开。

△出自今年《机器人视觉与应用》课程本人制作的课件
是什么
ROS是Robot Operating System的缩写,原本是斯坦福大学的一个机器人项目,后来由WillowGarage公司发展,目前由OSRF(Open Source Robotics Foundation,Inc)公司维护的开源项目。
1、首先是一个操作系统
根据wikipedia定义,操作系统是用来管理计算机硬件与软件资源,并提供一些公用的服务的系统软件。而ROS也自称是一个OS。
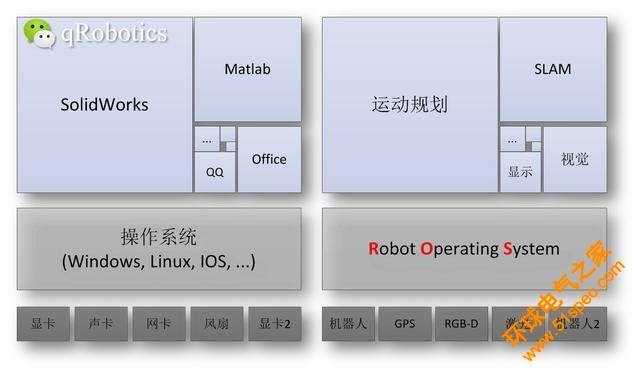
△计算机OS与机器人OS对比示意图
如上图所示,计算机的操作系统将计算机硬件封装起来,而应用软件运行在操作系统之上,不用管计算机具体应用的是什么类型的硬件产品。这能大大提高软件开发效率(否则大家只能都写汇编了)。
同理,ROS则是对机器人的硬件进行了封装,不同的机器人、不同的传感器,在ROS里可以用相同的方式表示(topic等),供上层应用程序(运动规划等)调用。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


