
当前位置: 首页 > 工业控制产品 > 运动控制 > 工业机器人 > 直角坐标型工业机器人
发布日期:2022-04-18 点击率:23
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。随着互联网和智能手机的大潮,嵌入式处理器正在完成以前台式处理器做不到的事情,于是乎机器人现阶段又被重新定义。在现在的消费领域,某些配备智能处理器和具有互联网功能的产品也被成为了机器人,下面列举一些成熟产品的例子:
下图是两款国内厂家生产的机器人的产品,属于生活工具的类别,一般放置在家中,无法自行移动,采用嵌入式处理器,带有摄像头、无线网络模块、显示模块,可以连接手机,通过手机APP端对机器人进行相关设置,同时机器人摄像头采集到的图像也能实时传给手机,也可以和手机进行语音对讲。机器人也带有语音识别模块,如可以向它询问“明天天气如何”,他会从网络获取天气信息然后回答你。这些放置在家中的机器人也可以实现安全监测的功能,通过手机实时查看家中的监控影像是一点,也可以适配各种传感器,比如贴在门窗后面的加速度传感器,当门窗被动作时传感器给机器人发出信号,机器人随即通过设定的方式进行报警。


下图是两款国外生产的机器人,最主要的特点是可以运动,属于智能玩具的范畴。它们都是可以连接智能手机,通过手机对机器人进行设置,然后把手机当做机器人的操作杆,操作机器人做出各种运动,达到娱乐的目的,机器上装有摄像头,也可以在手机上同步看到机器人摄像头拍摄到的视频画面。在玩法也有一些创新,如左边的机器人在星战电影里有原形,用手机的摄像头对准该机器人,通过手机端的AR技术,在手机屏幕里可以给机器人加上各种效果,增加娱乐性。


还有一些具有特殊用途的机器人,比如扫地机器人,根据内部的路径算法清洁地面,同时能自动避开障碍物,快没电的时候能自动返回充电桩充电。
以后服务机器人的趋势会是以上列举的这些机器人的集大成者,即在软件智能和机械运动上不断发展。软件智能方面通过高性能的嵌入式处理器实现视频处理、网络连接和语音识别等技术。机械运动方面先搭配单片机和步进电机通过轮子的滚动实现移动,通过机械零件的增加和算法的改进,逐渐实现动物甚至人体的肢体行走。下面的框图列出了实现这样的一个机器人需要采用的可能的技术:
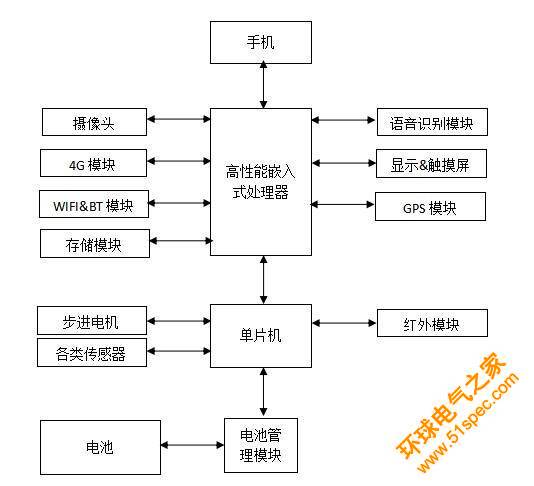
高性能嵌入式处理器上运行着机器人的核心系统。摄像头采集视频图像,会对图像中的事物进行一些简单的判别,比如识别人脸,对静态事物的图像采集也能让机器人辨别障碍物,或者计算出静态事物的大致几何图形甚至尺寸,对动态事物的图像采集,机器人可以计算出动态事物的运动轨迹甚至速度。4G和WIFI&BT模块属于无线通信模块,有了无线通信机器人才能得到自身之外的更多信号,也可将自身的信息传达给别人。语音识别模块能让机器人识别声音,显示&触摸屏只是机器人与外界交互的一种方式,GPS模块能让机器人知道自己的位置信息,存储模块除了存储机器人的系统和各类软件外,也让机器人有了记忆功能,前面讲的摄像头采集视频图像并计算,计算的结果可以存储在存储模块中,当遇到类似的计算的时候就可以判别事物,同时通过网络模块可以将这类信息传递出去分享给更多的机器人。单片机管理着机器人各类基础的模块,步进电机控制机器人的运动,各类传感器让机器人有了感知外界环境的能力。红外模块可以实现对一些外部电器的操控,电池和电池管理模块给整个机器人的运转提供能量。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


