发布日期:2022-10-09 点击率:175
【导读】得益于手持设备等的强劲需求,预计2015年MEMS陀螺仪市场将达到11亿美元。高性能及低成本等诸多优势使MEMS陀螺仪有望取代加速度计,成为移动MEMS和消费电子领域的盈利冠军。而对于这位市场新宠,你又了解多少呢?

多轴MEMS陀螺仪结构大幅缩小,单封装集成数字接口,占板面积仅几平方毫米,低廉的价格被大多数客户接受,这些优势促使MEMS陀螺仪渗透到手持设备市场。MEMS陀螺仪让便携设备能够增加很多令人惊喜的特色功能,其中包括提高相机性能的图像稳定功能;增加更多功能并提高易用性的用户界面;令人兴奋的游戏娱乐功能。MEMS陀螺仪还将用于需要高灵敏度、低噪声、低漂移的航位推测和GPS辅助导航。
本文讨论如何根据角速率和角位移测量结果,从一个MEMS陀螺仪快速获取有价值的信息。 第一部分论述MEMS陀螺仪的工作原理和目标应用;第二部分介绍模拟输出或数字输出MEMS陀螺仪的主要参数;第三部分介绍MEMS陀螺仪的实用校准技巧;第四部分通过4个示例,从角位移的角度说明如何测试MEMS陀螺仪的性能。
一.MEMS陀螺仪技术概述
MEMS陀螺仪在高性能和低功耗方面取得了巨大的进步。这些器件可实现量产、价格低廉、尺寸紧凑,被广泛应用于消费电子产品中。
1. MEMS陀螺仪工作原理
MEMS陀螺仪利用科里奥效应测量运动物体的角速率,如图1所示。
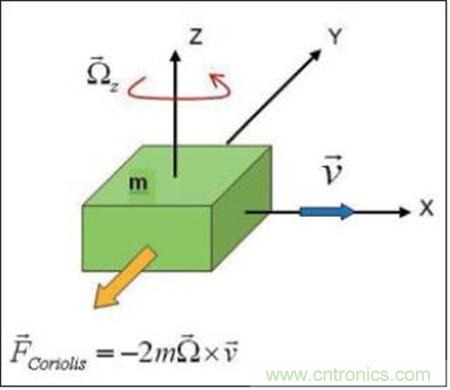
图1:科里奥效应
根据科里奥效应,当一个物体(m)沿V方向运动且施加角旋转速率Ω时,该物体将受到一个黄色箭头方向的力。然后,从一个电容感应结构可以测到科里奥效应最终产生的物理位移。
目前市面上的MEMS陀螺仪多数采用一种调音叉结构。这种结构由两个振动并不断地做反向运动的物体组成,如图2所示。当施加角速率时,每个物体上的科里奥效应产生相反方向的力,从而引起电容变化。电容差值与角速率Ω成正比,如果是模拟陀螺仪,电容差值转换成电压输出信号;如果是数字陀螺仪,则转换成最低有效位。
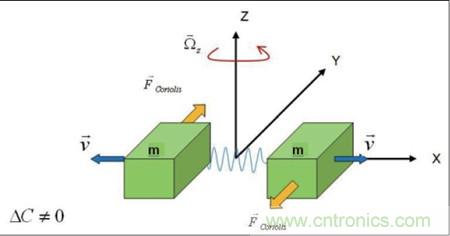
图2:当施加角速率时
如果在两个物体上施加线性加速度,这两个物体则向同一方向运动。因此,不会检测到电容变化。陀螺仪将输出零速率输出值或最低有效位,表示MEMS陀螺仪对倾斜、撞击或振动等线性加速度不敏感。
[page]
2.MEMS陀螺仪应用
下面是MEMS陀螺仪的目标应用:.
● MEMS陀螺仪能够测量角速率。数码相机使用陀螺仪检测人手的旋转运动,能够对图像起到稳定的作用。在汽车上,偏航陀螺仪可以开启电子稳定控制(ESC)制动系统,防止汽车急转弯时发生意外事故。当汽车出现翻滚状况时,滚转陀螺仪可以引爆安全气囊。
● 当汽车导航系统无法接收GPS卫星信号时,偏航陀螺仪能够测量汽车的方位,使汽车始终沿电子地图的规划路线行驶,这个功能被称之为航位推测系统。
● 偏航陀螺仪还能用于室内机器人控制。
● 安装在机器人四肢上的多路惯性测量单元(IMU)能够跟踪和监测身体运动。
● IMU可用于空中鼠标。
● IMU还能用于运动控制式游戏平台。
● IMU配合磁力计和GPS接收器,可以在手持设备上执行个人导航功能。
二.理解MEMS陀螺仪的主要参数
● 电源(V):这个参数规定了陀螺仪正常工作所需的直流电源电压范围。
● 电源电流 (mA):这个参数规定了陀螺仪正常工作所消耗的电流大小。
● 睡眠模式电源电流 (mA):这个参数规定了陀螺仪在睡眠模式下所消耗的电流大小。
● 关机模式下的电源电流(μA):这个参数规定了当陀螺仪电源关闭时所消耗的电流大小。
● 全量程 (dps):这个参数规定了陀螺仪的量程范围。
● 零速率输出值(电压或最低效位):这个参数规定了当陀螺仪没有被施加角速率时的零速率输出信号的数值。
● 灵敏度 (mV/dps或dps/LSB):这个参数规定了在零速率输出值时1 dps与模拟陀螺仪输出电压变化的关系,用mV/dps表示;数字陀螺仪的灵敏度(dps/LSB)表示1个最低有效位与dps的关系。
● 灵敏度变化与温度关系(%/°C):这个参数规定了当温度偏离25℃室温时,以℃为单位的灵敏度百分比变化。
● 零速率输出值变化与温度关系(dps/℃):这个参数规定了当温度偏离25℃室温时,以℃为单位的零速率输出值的变化。
● 非线性 (% FS):这个参数规定了陀螺仪输出与最佳匹配直线之间的最大误差占全量程(FS) 的百分比。
● 系统带宽(Hz):这个参数规定了角速率信号频率范围:从直流到模拟陀螺仪可测量的内部带宽(BW)。
● 速率噪声密度 (dps/√Hz):这个参数规定了能够从陀螺仪输出以及BW参数获得的模拟陀螺仪和数字陀螺仪的标准分辨率。
● 自测 (mV or dps):这个功能可用于测试陀螺仪工作是否正常。这个功能的好处是在陀螺仪安装到印刷电路板后无需旋转印刷电路板即可测试陀螺仪。
三.MEMS陀螺仪校准
每个陀螺仪在出厂前都经过严格的性能测试以及灵敏度和零速率输出值校准。不过,当陀螺仪组装到印刷电路板后,因为机械或电焊应力的影响, 零速率输出值和灵敏度可能会略微偏离工厂校准调试值。对于游戏机和遥控器等应用,设计人员只要用数据表中的典型零速率和灵敏度参数,即可把陀螺仪的测量信号转换成角速率。对于要求严格的应用,设计人员需要重新校准陀螺仪的零速率输出值、灵敏度和以下重要参数:
● 失准 (又称跨轴灵敏度)
● 线性加速度灵敏度或g-灵敏度
● 长期运行偏差稳定性
● 导通-导通偏差稳定性
● 长时间工作后偏差和灵敏度漂移
1.消除零速率不稳定性
公式1是陀螺仪输出的表达式。![]()
其中:
Rt (dps)是实际角速率
Rm(LSB)是陀螺仪的测量结果
R0 (LSB)是零速率输出值
SC (dps/LSB)是灵敏度
为修正导通-导通偏差不稳定性,在陀螺仪上电后,用户可以采集50~100个输出数据样本,取这些样本的平均值作导通零速率输出值R0 ,假设该陀螺仪是静止状态。
因为温度变化和测量噪声,当陀螺仪是静止状态时,陀螺仪的每次读数可能略有不同。设定一个阈值Rth ,如果陀螺仪测量值的绝对值小于阈值,则使陀螺仪的读数归零,如公式2所示。这个方法将消除零速率噪声,当陀螺仪静止时,角位移不会累加。![]()
每当陀螺仪静止时,用户可以采集50~100个陀螺仪数据,然后取这些样本的平均值作为零速率输出值R0。这个方法可以消除零速率运行偏差和微小温度变化。在零速率采样后,必须从上面的几步开始考虑不稳定性,因此公式 (1) 变为:![]()
因此,下一步就是利用一个参照系统确定公式3中的灵敏度SC的数值。
应该强调的是,MEMS陀螺仪的灵敏度非常稳定,受工作时间和环境温度的影响很小,仅上面提到的高灵敏度应用才需要校准过程。
[page]
2.使用角速率测量台确定灵敏度
因为陀螺仪能够直接测量角速率,所以角速率测量台是校准陀螺仪灵敏度的最佳参考标准。在一个精确角速率测量台内有一个内嵌温度单元。为了确保在校准陀螺仪过程中角速率测量台不受环境振动的影响,角速率测量台被置于一个振动隔离平台之上。
把手持设备置于一个正方体的铝盒或塑料盒内,然后把整个系统安装在角速率测量台上进行校准。使角速率测量台沿顺时针和逆时针两个不同方向旋转。如果被校准的是多轴陀螺仪,把方正形测试盒置于角速率测量台上的不同方位,然后重复上面的校准过程。收集完陀螺仪在不同状况下的原始数据后,即可确定零速率输出值、灵敏度、失准矩阵和g灵敏度值。
校准陀螺仪还可以选用步进电机旋转测量台,用一台个人电脑控制步进电机旋转测量台。
3.使用数字罗盘确定灵敏度
如果没有角速率测量台,可以使用数字罗盘代替角速率测量台。
在校准陀螺仪前,需要校准数字罗盘的倾斜度,然后将其置于周围没有干扰磁场的平台上。合并在固定采样间隔内采集的数字罗盘相对方向信息和陀螺仪输出数据,按公式4校准陀螺仪的灵敏度。
其中:
N:采样数量
h:采样间隔
H(1) :电子罗盘初始方向
H(n):罗盘在第n个样本时的方向
SC (dps/LSB):陀螺仪灵敏度
ΔR(i) :在去除零速率输出值和死区后,在第i个样本的陀螺仪
输出数据公式4可改写为:![]() (5)
(5)
其中: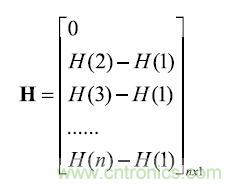
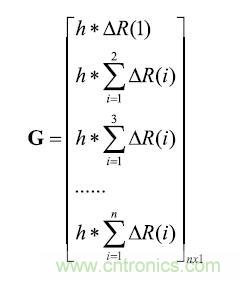
因此, 我们可以从公式5得到利用最小平方方法计算的SC。![]()
图3描述了以度为单位的罗盘相对方向的变化,以及合并数据后的陀螺仪角位移。通过观察图3不难看出,罗盘相对方向变化(红线)与陀螺仪位移(蓝线)有非常好的线性关系。通过公式6,我们可以求得陀螺仪灵敏度校准参数。
[page]
4.MEMS陀螺仪测试
在完成陀螺仪校准后,最后一步是测试陀螺仪的性能,了解如何从陀螺仪原始数据中获取有价值的角位移信息。
测试1:当陀螺仪静止时
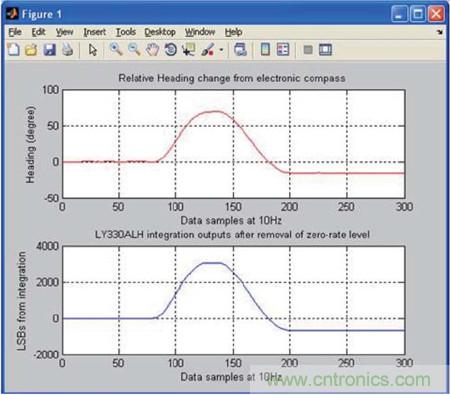
图3:罗盘相对方向和陀螺仪角位移
当陀螺仪没有旋转时,陀螺仪输出原始数据应在零速率输出值附近,且数据整合后陀螺仪方向应始终为0°。
测试2:当陀螺仪顺时针整圈旋转时
在采集30-~50个陀螺仪原始数据样本以修正零速率输出值偏差后, 使陀螺仪顺时针旋转90°,再继续旋转90°,直到旋转360°。见图4。
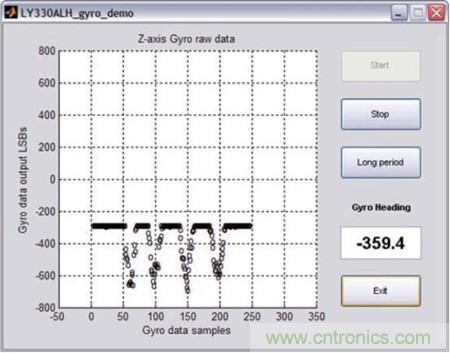
图4:整圈顺时针旋转的单轴陀螺仪
测试3:当陀螺仪逆时针整圈旋转时
在采集30~50个陀螺仪原始数据样本以修正零速率输出值偏差后,使陀螺仪逆时针旋转90°,再旋转90°,直到旋转360°。这种情况下,每次旋转90°时,角速率都不相同,但是陀螺仪方向测量精确归零,误差大约仅1.6°。
5.结论
随着MEMS技术和制程的进步,MEMS陀螺仪的成本不断降低,性能不断提高,功耗越来越低,尺寸越来越小,能够让手持设备增加更多新功能。
MEMS陀螺仪是在特性测试和质量检测过程中完成校准。大多数应用没有必要校准陀螺仪,不过,对于复杂的要求严格的应用(如导航和航位推测),在组装到印刷电路板后投入量产前,需重新校准零速率输出值和灵敏度。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


