
发布日期:2022-04-17 点击率:42
【导读】在为感性负载设计驱动电路时,需要考虑尺寸、成本、开关速度、可靠性、功耗和散热等因素。本文讨论了如何利用继电器和电磁线圈来节省功耗。继电器或电磁线圈等感性负载需要一定的电能去激励负载,一旦完成激励,所需的电能就可以降低,而负载仍保持激活状态。
在选择一种特定的设计方法时需要考虑诸多因素,而且这些因素相互间并不总是独立的。在为感性负载设计驱动电路时需要考虑尺寸、成本、开关速度、可靠性、功耗和散热等。诸如继电器或电磁线圈等感性负载有别于简单的阻性或容性负载,它们需要一定的电能去激励负载,一旦完成激励,所需的电能就可以降低,而负载仍保持激活状态。低电流的额外好处是可以在较短时间使负载停止工作。
我在以前发表的博客文章“反电动势和缓冲器”中,我讨论了开关型感性负载的一个方面,建议你跟随我的思路,继续有关缓冲器的讨论。不管你是否选择断开感性负载的电源,反电动势(back-EMF)总是存在的。
在应用以下技巧时,并不是所有感性负载的数据手册都能提供足够的信息。事实上,在我为这篇博客搜集资料时,几乎没发现哪个数据手册上有这样的信息。然而,SchrackRT2系列继电器提供了很好的例子。正如你看到的,在拉电压、继电器以及保持负载处于激活状态的要求之间有很大的差异。
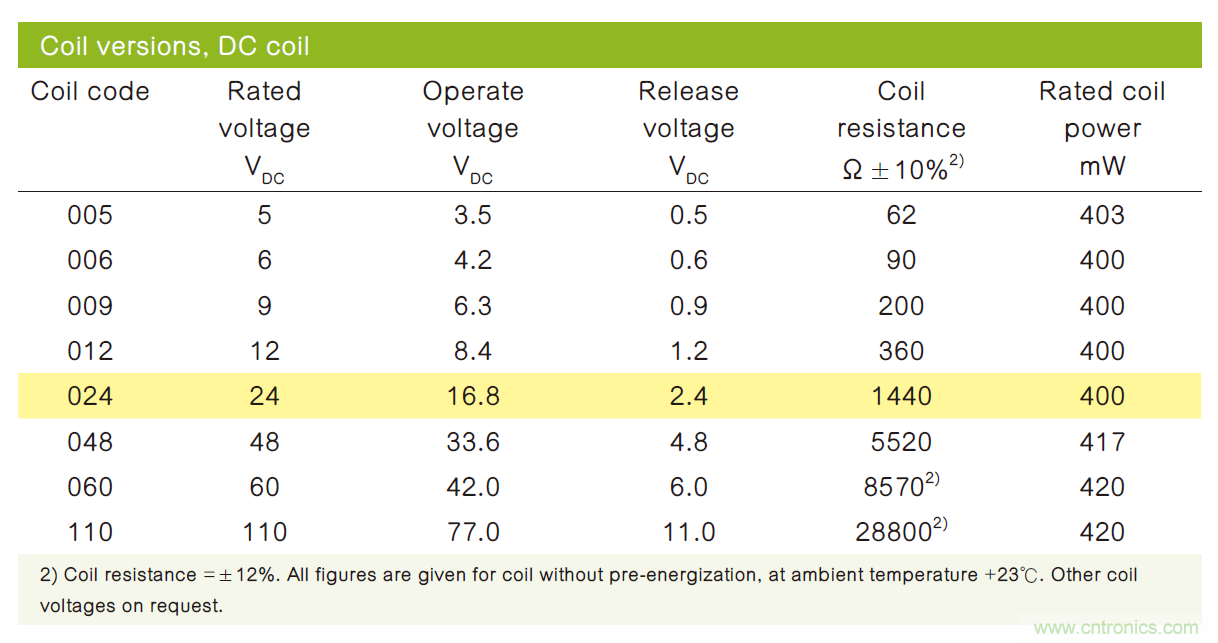
图1:高亮显示的是RTE24024参数。尽管够详细了,但数据手册中没有地方提及绝对最大线圈电压。(来源:TE Connectivity)
信息的缺失意味着你做的几乎所有设计都只能是“试试再说”。一旦你真正确定想要使用的方法和量值,就得考虑由于生产扩张、电压变化和温度/湿度改变而造成的量值变化。如果可能的话我还是建议选用提供参数的产品。
控制感性负载要求调节线圈上的电压或改变电流。如果你想全部自己做,可以采用下面这些方法。图2只是概念性的显示,对双极型结晶体管(BJT)来说在晶体管基础上必须有一个限流电阻,在A图中没有指明转换触点的电子控制机制。
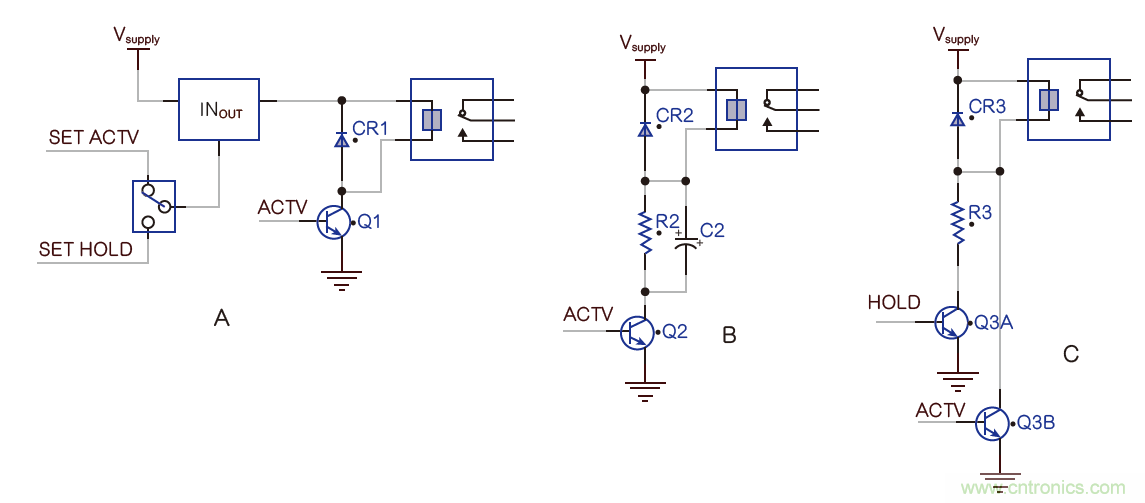
图2:直接调整线圈供电电压的基本方法。
如果你能控制电源,就可以使用图2A所示的方法。仔细看一下下面列出的设计实例,会发现这是最通用的方法。事实上,你可以使用第二组触点反馈触点闭合来触发这种转换。通常人们使用整流和平滑的电源而不用稳压电源。然而,主电压和放大器制造方面的变化意味着你必须允许宽的容差才能适用于小批量生产,但我更愿意选用大批量生产和很大的余量。如果使用多个独立线圈也很不方便。
图2B展示的是一种很常见的技术。当线圈通过晶体管Q2得到激励时,电容C2相当于短路,整个电压施加于负载之上。C2根据电路的时间常数(C2的值和线圈的电阻)进行充电,线圈上的电压逐渐降低。这个电压将稳定在由线圈内阻和R2组成的电阻分压器确定的电压值。这种方法虽然简单,但有一些缺点。一般来说,电容都有一个很大的值,因为元件的容差和温度特性因素,实际下降稳定时间会有比较大的差异。另外,在稳定状态下R2也会有功耗,那个电阻可能要很大,可能会发热。
如果微处理器还有额外的输出,那么作为图2B改进版的图2C可以节省浪费的空间和时序不确定的电容,代价是再用一个晶体管(Q3A)。为了激励负载,需要使Q3A和Q3B导通。一旦完成激励(根据时间或闭合触点的确认),Q3B就可以停止工作了。
要解决从数字域转变到模拟域的任何问题,推荐解决方案是PWM。通过改变开关波形导通的比例,我们可以调节平均电压以及平均功率。没有额外的电阻要散热,也没有额外的电容会浪费空间或搞乱时序。
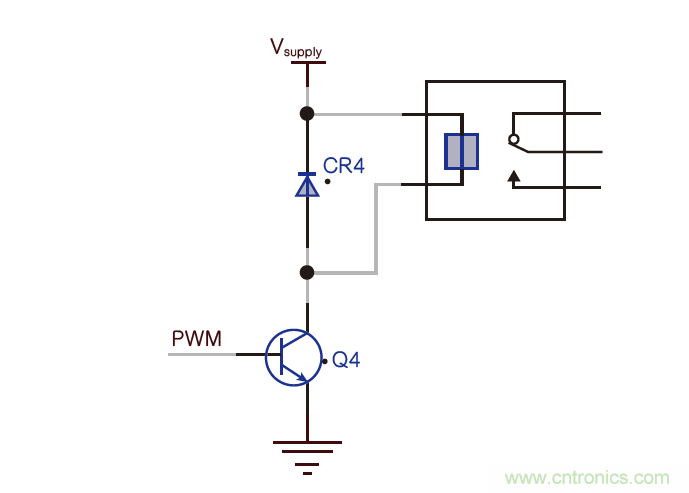
图3:用于连接PWM驱动的简单电路连线示意图。
我们可以创建一个独立的PWM信号,然后用起始信号加以选通,这样需要两个引脚来控制负载,但如果认为现代微控制器不能用一个引脚实现从0到100%的PWM就太天真了。若是感性器件制造商能够提供有关实现可靠操作的细节就再好不过了。我不能确定这是否普遍,不过ASCO等制造商就专门为了这个目的而生产器件,如图4所示。总算得到可以保证的性能!
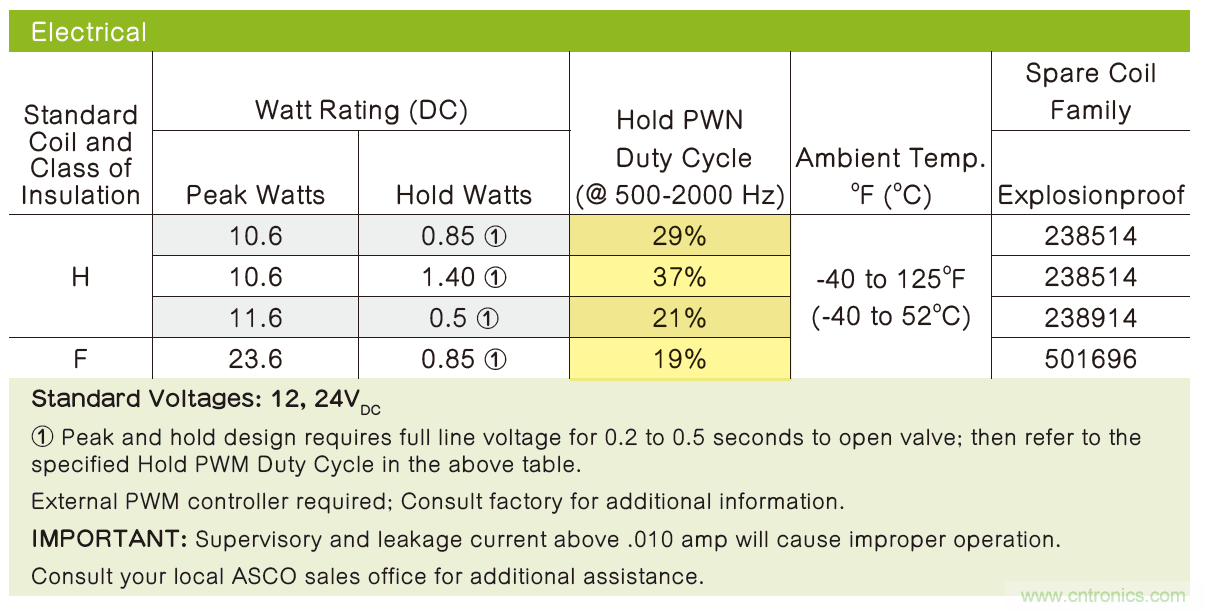
图4:摘自ASCO HV427246气体关闭阀数据手册。(来源:ASCO)
至此我只讨论了电压的控制,你可以通过控制电流达到同样的目的。要实现用分立元件做电流控制器太费劲了,但是有一个很简单的解决方法。有一些IC能够做到这点!
最直接的是英飞凌公司的恒流双通道继电器驱动器TLE7241,英飞凌也有六通道的器件TLE6288R,以及另外一个器件——用于线性电磁线圈的TLE82453。
TI公司则有DRV120。美信公司提供8通道的驱动器MAX4822-4825。我还刚刚发现了一家以前从未听过的IC制造商iC Haus,该公司生产3种节能型继电器/电磁线圈驱动器。
有关这次讨论的最后提示:你选择的继电器/电磁线圈也会对功耗有很大的影响。如果选择自锁继电器,那么在稳定状态功耗会降至零。制造商设计的“敏感性”元件只需较小的电流就能激活。
你还需要仔细考虑器件的等级。有些器件规定用于临时性操作,因此不适合想要降低功耗的长期工作环境。当制造商不提供数据时,反复试验后再将结果应用到生产是很有必要的。最后提醒一点,采用这种节能方法有一个不太明显的副作用,在高振动/冲击环境下电能可能不足以使继电器/电磁线圈保持激活状态。
后记
在写这篇博客时,我在一个已经启动的项目中使用了图4所示的器件。在2个月内我又启动了另一个项目,使用了类似于图5中数据的电磁线圈。不仅数据手册中缺少关键参数(比如绝对最大电压),Guardian公司还完全不提供技术支持。我的客户说这是一个1A的电磁线圈,最大激活时间是4s,否则它会过热。
这次没有任何有关怎样PWM驱动器的信息。
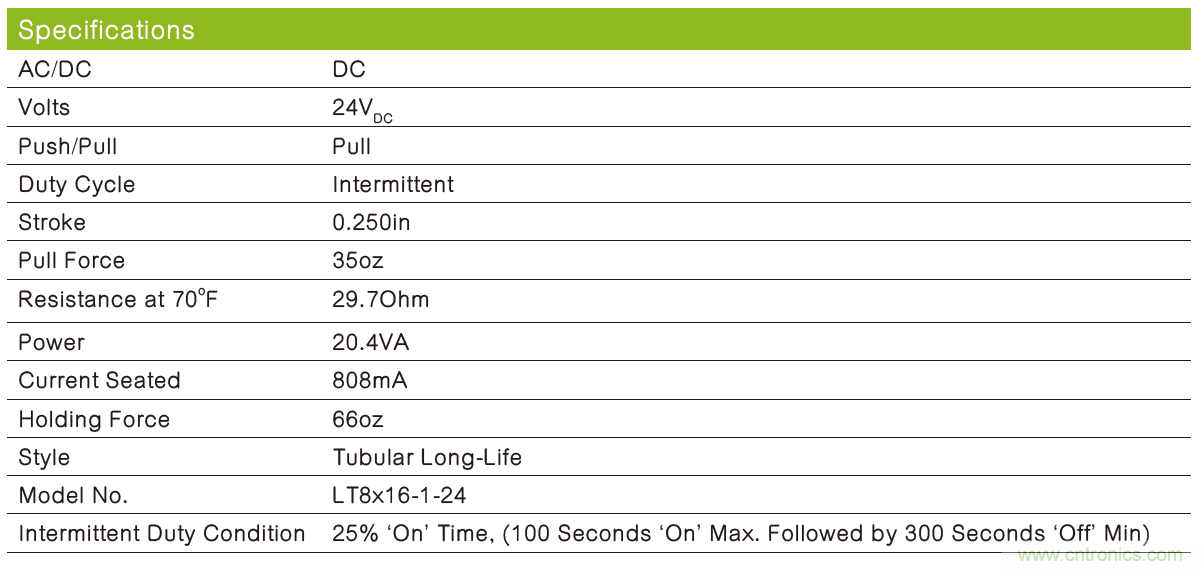
图5:Guardian Electric公司提供的电磁线圈标记为LT8X16-29.7-24VDC。这是我在Guardian网站上发现的最近似产品。(来源:Guardian Electric公司)
我审阅了一下上面的内容。我想要PWM方法,而我的描述有点老套——你会如何真正去确定起始脉冲,并保持PWM和频率。我建议你使用能方便调整参数的配置——我使用的是赛普拉斯公司的PSoC5LP开发套件,它有一个电位计、一组开关和LED,以及一大堆I/O。
幸运的是,这种电磁线圈和连接装置是完全可见的,因此我可以看到真实发生的事情。
我的设计会提供一个脉冲来激活电磁线圈。我写了一个小程序来读取电位计的设置,并将它转换为导通时间。从大概1s的位置开始,然后退回来看电磁线圈停止拉入的地方。令人惊讶的是时间很短,不到100ms。我将脉冲宽度设为150ms。然后将微处理器的启动脉冲配置为150ms,并转换为PWM。我为PWM信号选择了一个2kHz的频率,然后根据电位计的位置重写程序来调整PWM设置。接着尝试激活电磁线圈,并在每次尝试时退回到PWM,看看它何时退出。试验表明,激励晶体管的速度是限制因素,它在PWM小于10%时无法跟上,因此有效极限是10% PWM(见图6)。
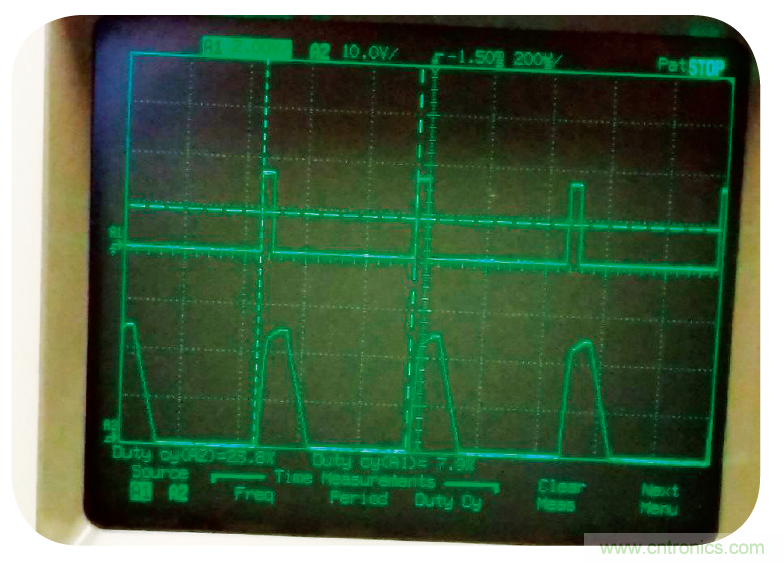
图6:上方是微处理器产生的PWM,下方是驱动晶体管的输出。PWM约为8%,可以看到由于驱动器响应的原因,有效输出曲线是如何变得更多的。
在2kHz时可以听得到啸叫。将频率提高到4kHz,驱动器又不能顺畅工作,因此只好回退到2kHz。我认为在实际应用中这不会有问题,不过还是让时间来证明吧。
总之,我得到了一个150ms的启动脉冲、一个2kHz的PWM信号和10%的PWM。电流从大约800mA降低到76mA。还不错!
本文转载自电子技术设计。
推荐阅读:
机器人核心零部件,绕不过去的一道坎
扒一扒日本电子元器件产业的那些事,数据惊人
军用机器人全景图~
为什么选择旁路电容很重要?
一文看懂半导体制程发展史
下一篇: PLC、DCS、FCS三大控
上一篇: 可靠的高速PCB信号走


