
发布日期:2022-10-09 点击率:49
关键词: 迈信 EP3E SCARA机器人
摘要:本文旨在介绍EP3E伺服驱动器在SCARA机器人上的应用,同时为客户提供一套完整的基于POWERlink总线的机器人电控系统解决方案。
SCARA机器人是桌面型的4关节机器人的机型,广泛应用于金属加工行业的上下料、电子产品行业的点胶、涂胶与搬运、玻璃行业的搬运与组装。虽然国内机器人处于快速的发展中,但国内的SCARA机器人大多都是采用脉冲方式控制,一个运动控制单元只可以完成单个SCARA机器人的控制,无法完成SCARA机器人各轴的状态监视与控制。
EP3E-EP
EP3E伺服驱动器是武汉迈信电气技术有限公司推出的国内首款基于POWERlink总线的伺服驱动器:可外接单圈或者多圈绝对式编码器;实时总线抖动在线同步调整等创新技术,为客户提供更加高性能,更加灵活,更加安全的伺服系统。
EP3E伺服驱动器从产品尺寸、接线方式上非常适合多机器人的工业现场生产,其POWERlink总线一网到底的连接方式,为客户的SCARA机器人自动化流水线提供更多便利,将为客户提供更具性价比的方案。
本次项目所使用的SCARA机器人,具有结构紧凑,生产效率高,精度高,过载能力强等特点。该项目用于自动点胶生产线,同时也适用于点胶工艺,激光切割,焊锡等场合。
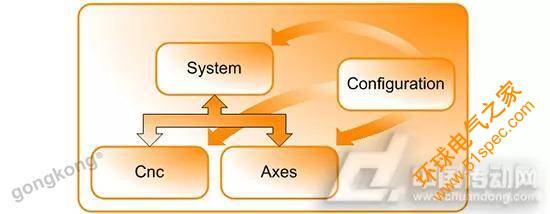
图1、SCARA机器人解决方案的照片
系统设计
1、客户需求
客户要求SCARA机器人具备较高的加工速度,以及较高自动化水平,能够自动完成产线的上料、下料等功能,同时要求高稳定性。此外,客户还要求能够通过远程访问来实时查看机器人的工作状态。
2、系统设计方案
通过对客户需求的深入分析,我们为客户设计了“B&R的X20控制器+EP3E伺服驱动器”的电控解决方案,如图2所示。

图2、SCARA机器人电气方案图
系统优势
1、融合MC,CNC,robotics的X20运动控制系统
基于X20的运动控制解决方案:利用通用运动控制技术设计平台,通过POWERlink总线技术将机器人、CNC、多轴运动和单轴定位组成一个系统。可以将复杂的路径信息应用到机床和生产机械中;还可以实现控制多轴的关节机器人,进行复杂的3D图CNC加工;借助实时操作系统,运动控制循环时间可达400μs,CNC、PLC、I/O和驱动器可至微秒级高精度同步;同一处理器处理运动控制和逻辑控制,CNC和PLC同步运行任务。
X20的软件框架如图3所示,所支持的CNC技术包括:
支持标准DIN66025的标准语言,支持客户自定义解释语言;
每个系统拥有8个CNC通道,每个CNC通道插补最多15个轴参与,每个CNC通道非插补不限制轴数;
各路径段具有“程序段预读”功能,优化运动轨迹,可以实时更改速度倍率;
自动切线刀具向导,广泛应用于皮革切割、玻璃切割等行业;
沿轮廊反向运动,广泛应用于激光切割、水切割等行业;
二十余种多轴运动转换,支持客户自定义坐标变换;
单向和双向螺距误差补偿和反向间隙补偿,支持直角坐标系的轴偏移补偿;
所有技术功能:铣、磨、切割、焊接、搬运、包装、木工、红木、石材、大理石、玻璃切割等行业。

图3、软件框架
2、EP3E高性能伺服驱动器
EP3E是国内首家通过EPSG组织(The Ethernet POWERlink Standardization Group)的一致性测试的产品,因此可以很好的与X20控制器进行配合;EP3E内置的电流环、速度环、位置环的控制周期分别为50μs、100μs、100μs;可以支持17bit的单圈与多圈编码器,以及20bit的单圈与多圈编码器;支持实时以太网总线的抖动同步调整技术,可以充分满足MC、CNC、robotics对于动态响应和同步性的要求。
3、系统软件框架

图4、系统软件框架
系统软件由Configuration、System、CNC以及Axes等模块组成:Configuration模块负责整个系统的配置工作;System负责系统状态机;CNC和Axes分别负责插补通道状态机和轴状态机。为实现完整的机器人软件功能,系统软件还包括如坐标变换、伺服通讯及人机界面通讯等功能。
系统性能测试
在实际测试过程中,系统用了极短的时间就调试成功。
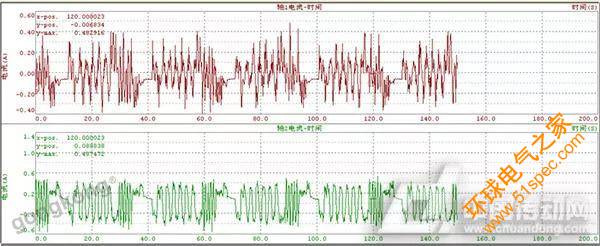
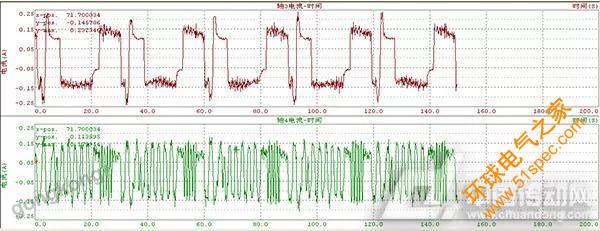
图5、SCARA机器人各轴工作电机电流的trace数据
武汉迈信电气技术有限公司致力于为国内自动化设备厂商提供POWERlink总线伺服驱动器,在性能与功能上能够满足MC、CNC、robotics各个行业对伺服系统的要求,同时,价格上也没有国外伺服驱动器那么高昂,从而实现国产SCARA机器人的POWERlink总线化,降低国产机器人的总体成本,提高国产机器人的竞争力。
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


