
发布日期:2022-04-20 点击率:22
引言
交流永磁同步电机以其效率高、功率密度高等优点,被广泛应用于工业控制中。同时,交流永磁同步电机控制系统是一个典型的非线性、强耦合的系统,很难用准确的数学模型描述,因此多采用传统的PID实现伺服控制,并取得一定的控制效果,但该系统易受到电机参数失配和负载扰动的影响,很难满足更高要求的伺服控制场合。
为了提高伺服系统性能,解决常规PID控制策略存在的问题,许多科研人员做了大量研究,并将控制理论研究的最新成果应用于交流永磁同步电机控制系统中,如滑模变结构控制、预测控制、遗传算法控制等成为研究热点,并在永磁同步电机控制系统的应用中取得了较好的效果。在永磁同步电机矢量控制调速系统中设计了滑模速度、电流控制器,实验结果表明系统鲁棒性和快速响应性能得到改善,但综合参数调试比较困难,不易实现宽调速范围要求。提出了模型预测转矩控制策略,但系统控制性能受电机参数变化影响较大,鲁棒性差。遗传算法以及鲁棒控制可以使电机控制性能在某一方面有较大提高。但在交流永磁电机电流、速度、位置三闭环控制系统中,各个闭环特点不同,很难用某一种控制策略解决高性能交流永磁电机伺服系统中的所有问题。
为提高永磁同步电机速度调节的动态品质,在分析常规PID控制中比例、微分对干扰信号过于敏感,对于时间延迟积分作用易产生振荡的特点后,提出了二阶自抗扰速度控制策略。该控制器通过适当协调安排比例、微分的过渡过程,解决了快速性和超调量之间的矛盾,能够取代传统的PI调节器。仿真结果表明,该控制器能实现系统快速响应,且没有超调产生,改善了系统的稳态特性。
1永磁同步电机数学模型
为了便于分析,将永磁同步电机数学模型进行如下简化:忽略定子铁芯饱和特性,假定磁路呈线性,电机参数不变,气隙磁场成正弦,无铁芯涡流及磁滞损耗。在dq坐标系中,永磁同步电机的电压方程为:

式中:ud、uq为交、直轴电压:R为定子电阻:id、iq为交、直轴电流:ωr为转子电角速度:Ld、Lq为d、q轴电感:D为微分算子:Ψf为永磁体磁链。
转速方程为:

式中:J为转子转动惯量:np为转子转速:T为负载转矩:B为阻力系数。
2永磁同步电机自抗扰速度控制器设计
永磁同步电机自抗扰速度控制器主要由跟踪微分器、扩张状态观测器两部分组成,其中跟踪微分器的作用是为系统速度输入安排过渡过程,得到光滑的输入信号:扩张状态观测器可以实时跟踪电流环状态以及获得系统电流、速度环中内扰和外扰的实时作用量,并将实时作用量作为电流环输入补偿量输入到交、直轴电流控制器中。
给定转速指令n0,安排适当的过渡过程n1,同时得到生成控制律所用到的给定转速的微分信号n2,电机转速线性跟踪微分器的形式如下:
式中:f为二阶被控函数。
随着速度因子r增加,n1能在速度环中充分逼近转速值n0,而n2=n1作为速度参考值n0的导数,式(3)可变为:
式中:h为积分步长:r为速度因子:α为非线性因子:h0为跟踪微分的滤波因子。
引入非线性控制函数:

根据速度、电流环方程,扩张状态观测器(ESO)的具体表达式如下:

式中:Δn为转速误差:β0、β1、β2为输出误差校正增益:a为扩张状态观测器对电机未知扰动的估计。
自抗扰电机控制系统通过非线性扩张状态观测器,把含有未知扰动的非线性不确定对象转化成"积分器串联型",对不确定对象实现动态补偿。
3自抗扰控制永磁同步电机调速系统
图1是采用自抗扰技术的永磁同步电机调速系统的结构,该系统采用了转速、电流双环控制。其中速度环采用二阶自抗扰控制策略,得到q轴电压参考输入,d轴电流采用id=0控制方式。扩张状态观测器对电机未知扰动进行估计并补偿于电流环的q轴电压。通过坐标变换,经sVPwM的调制得到控制电机的三相电压。

4仿真分析
为了验证文中提出的永磁同步电机速度控制策略的有效性,利用MATLAB软件进行仿真实验。仿真所采用的永磁同步电机参数如下:额定功率1.5kw,额定转速2500r/min,永磁磁链0.182wb,极对数4对,交直轴电感5.33mH,电枢电阻0.024Ω。
设置二阶自抗扰控制器的基本参数,跟踪微分器中速度因子r=200,为了得到较好的滤波效果以及过渡过程,取h0=0.03、h=0.001。非线性控制函数fa1(·)中涉及的参数分别为α=0.2、β0=150、β1=400、β2=1000。仿真分析主要是对比自抗扰控制系统和PID调速系统的转速调节性能。如图2所示,电机空载启动,在0.1s时刻参考速度突变为500r/min,采用PI速度调节器具有较好的速度响应,经过0.075s电机实际转速达到参考转速,但超调幅度较大,过渡过程长达0.05s,而采用自抗扰控制策略的电机转速具有较好的鲁棒性,电机转速达到指令转速过程中没有过冲现象,且电机完成过渡过程仅仅需要0.025s。
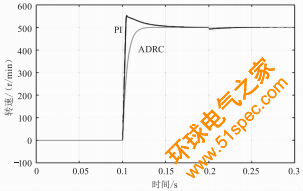
图2ADRC与P1控制策略速度响应仿真波形对比
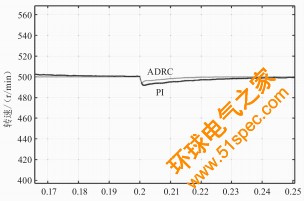
为了验证该调速系统对负载扰动的抑制能力,在空载启动电机后,转速达到500r/min时,在0.2s时刻分别给电机ADRC调速系统和PID调速系统突加5N·m的负载扰动,如图3所示,在PI控制策略下,转速的跌落幅度达10r/min,而在ADRC调速系统中,转速的跌落幅度仅有4r/min,且在0.02s后系统恢复稳定状态。因此采用ADRC控制策略使得系统具有更好的稳定性,对负载扰动具有更好的抑制效果。
![]()
图3ADRC与Pl控制策略负载扰动响应仿真对比
4结语
本文提出了一种永磁同步电机自抗扰调速方法,将自抗扰控制的原理应用到永磁同步电机速度控制系统中,对电机转速采用ADRC控制,进而通过ESO对扰动的估计值进行补偿,并作为电流环的参考输入。仿真结果表明,自抗扰控制器具有良好的动态和稳态性能,对负载扰动具有较好的鲁棒性。
下一篇: PLC、DCS、FCS三大控
上一篇: 为什么要关心系统中的


