
发布日期:2022-10-09 点击率:104
引言
《装备制造业标准化和质量提升规划》等相关规划中已将机器人列为十大重点领域之一,机器人技术的发展已经成为衡量国家科技水平的重要标志,这也对机器人标准化和质量提升提出了更高要求。本文主要在工业机器人标准化发展基础上,重点对工业机器人安全和电磁兼容问题进行论述,借助测试案例和测试数据对工业机器人在安全和电磁兼容上不符合项进行分析,并提出整改措施,以保证工业机器人在电磁环境下能正常安全运行和稳定工作。
1工业机器人电磁兼容试验现状问题
目前,工业机器人电磁兼容测试试验主要包括发射类测试和抗扰度测试两类,下面主要结合这两方面测试现状问题进行分析。
(1)在测试端口上的现状问题分析:工业机器人主要由控制柜、机器人本体机、示教器三部分构成。《电磁兼容通用标准居住、商业和轻工业环境中的发射》(GB17799.3一2012)标准对示教器与控制柜之间的线缆是否要参与测试没有进行明确说明,仅对工业机器人交流输入端口的传导发射测试有相关规定,不能满足工业机器人对于不同端口的电磁兼容性测试需求。
(2)在测试模式上的现状问题分析:工业机器人在运行作业中存在带载、空载、移动、静止、机械臂转动等不同运行模式,在这些模式进行机器人的电磁兼容测试,结果差异性大。但我国现有的工业机器人电磁兼容测试相关标准没有针对机器人在不同的工作模式进行测试内容和方法的规定。笔者认为应该对工业机器人进行移动式和固定式分类,并针对性进行不同模式的测试。
(3)在终测时间上的现状问题分析:《电磁兼容通用标准工业环境中的发射》(GB17799.4一2012)标准对于终测时间规定为1s,而实践中工业机器人在非全速度状态下运动周期为2~3s,因此在进行工业机器人的辐射发射测试过程中存在终测期间未能正确采到最高值的情况。笔者认为应合理调整标准规定的测试时间,确保测试时间大于工业机器人的运动周期。
2工业机器人安全试验
结合日常工作中对于大量工业机器人的检测认证实践案例和测试数据分析,笔者总结出机器人在安全检测试验过程中常见不符合项主要体现在配线设计、降速控制和无驱动源运动上,下面从试验安全角度对这些不符合项进行技术优化。
2.1配线设计
《机械电气安全机械电气设备第1部分:通用技术条件》(GB/T5226.1一2019)中13章对于工业机器人电柜外配线、电气设备的布线、电柜内配线和导线的标记等有相关技术要求。结合标准要求和试验实践总结,在机器人配线设计时需要考虑以下操作要点:(1)确保线路特别是保护连接电路连接的牢固性,避免出现松脱现象,引发安全检测问题:(2)采用色标方式进行保护导线标记时,要确保色标是绝对专用,且在导线全长上以黄/绿双色组合进行标记:(3)选择的接线端子要与导线截面积和类别相匹配:(4)一个端子对应允许连接一根保护导线,基于特殊用途专门设计的端子才允许进行多根导线的连接:(5)接线座的端子需要进行清晰标记,方便与电路图进行对应:(6)遵循技术文件要求对每根导线的端部进行标记。
2.2降速控制
《工业环境用机器人安全要求第1部分:机器人》(GB11291.1一2011)标准中对工业机器人的降速控制有明确规定和要求,如规定机器人在降速控制方式下操作时,末端执行器的工具中心点(TCP)和安装法兰需要选择低于250mm/s的速度。在进行具体机器人降速控制操作试验时,需要对机器人末端直线轨迹运动操作时机器人末端TCP速度测试和机器人手臂完全伸展到极限位置时轴1、轴2和轴3是单独转动轴时的末端线速度进行测试。这要求在机器人出厂前需要对其直线轨迹运动和手臂完全伸展到极限位置两种情况的末端线速度按要求进行限制。
2.3无驱动源运动
《工业环境用机器人安全要求第1部分:机器人》(GB11291.1一2011)标准中明确规定:进行机器人设计时需要确保各轴在异常紧急环境下无须驱动源就能运动,同时无驱动源运动的操作装置符合易于接近、有操作说明、贴警告标志和防止意外操作等要求。
3工业机器人电磁兼容试验实践分析
工业机器人电磁兼容试验认证的测试项目主要有工频磁场、辐射抗扰度、静电放电、传导抗扰度、快速瞬变脉冲群、浪涌、电压跌落和短时中断、辐射发射和传导发射。同时结合大量的工业机器人检测认证案例分析可知,在测试认证过程中常见不符合项为传导发射和辐射发射。下面结合搬运机器人RB20的电磁兼容测试案例进行分析。
3.1传导发射
如果机器人的电磁兼容设计不当,工作信号就会沿着电源线向外传输,成为传导骚扰。RB20整改前传导发射超出认证标准,如图1所示。
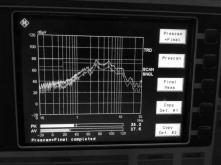
图1整改前超出认证标准
本项目传导发射测试采取如下整改测试:(1)电源线,测试时尽量要短些,电源入线口要加穿磁环。(2)加装适合的滤波器,注意滤波器进出线不能一起走线,尽量要离得远些:接地要良好,最好就近接地。(3)变压器进出线分开走线,尽量要离得远些。(4)其他电气元器件进出线要分开,强弱电分开走线,多余的线尽量都去掉。走线工艺要严格遵守强弱电分开走,380V、220V、24V都要分开走线,合理布线,不同强弱电距离尽量离得远些。(5)输出动力线和编码线要严格分开走线,不可并排布线:都要使用屏蔽线,可靠、就近接地,屏蔽接地使用3609环形搭接。如果干扰下不来可以加穿合适磁环:连接本体插头屏蔽要连接插头金属壳体接地。(6)本体布线线缆使用屏蔽线,屏蔽可靠接地,地线可靠接地。驱动器动力输出接线要绕合适磁环,绕的扎数为3~5圈,磁环尽量离接线端子近些:输出编码线绕合适磁环,绕1圈,磁环尽量离接线口近些。动力线、编码线一定不可一起走线,距离尽量远些,强弱电分开走线。整改后电柜内部如图2所示。
3.2辐射发射
辐射发射测试是测量被测样品通过空间传播的辐射骚扰场强。在具体测试上,接口滤波不好或电缆设计有缺陷等都可能造成辐射发射超标。此次是30~50MHz频段超出认证标准,使用排除法排除机器人电气柜是产生辐射干扰的源头,而主要干扰产生于变压器、驱动器以及走线线路。

图2整改后电柜内部图
机器人认证测试对机器人走线要求很高,此次认证反映出机器人走线不够严谨。走线时强弱电要分开,输入、输出线要分开:动力线、编码线、信号线要分开走线,不并行,屏蔽要3609搭接,就近接地:屏蔽要连接重载插头:所有接地都要就近接地,接地线尽量短:电柜动力线出线要加穿磁环:滤波器要考虑选用是否适合,此次辐射发射测试在变压器输出端多加了一个20A滤波器,有降低辐射发射干扰的效果。
本项目整改措施:(1)电源线进线加穿合适磁环,有降辐射的效果,地线也可加穿磁环尝试。(2)在变压器三相输出线多加接一个20A的滤波器以加穿磁环,绕上一圈。(3)驱动、电源盒输入/输出都加穿了磁环,抱闸输出线加穿磁环。(4)各强弱电分开走线,把多余的线去掉,380V、220V、24V都要分开走线,以降低辐射干扰。(5)把所有接地连接更紧密,确保接地更良好。(6)电柜电源线连接要求尽可能短。(7)所有通风口加贴铜箔,加强电柜的屏蔽效果。
此次整改由于时间问题,以通过测试为目的:对于整改的电源盒输入/输出、驱动输入、抱闸输出加穿磁环及通风口加贴铜箔没有验证是否有降低辐射的效果。
4结语
本文基于大量的工业机器人检测案例和丰富的试验数据,按照测试内容从电磁兼容角度分析了常见的不符合项,介绍了测试原理,并提出了整改建议,使机器人能够在电磁环境中符合要求并正常运行,不对其环境中的任何其他设备产生无法忍受的电磁干扰,提升了机器人的可靠性,有利于国产工业机器人领域健康有序发展。
下一篇: PLC、DCS、FCS三大控
上一篇: 机器人自动制孔系统应


