
发布日期:2022-04-20 点击率:48
引言
导弹武器和航天飞行器在试验阶段要模拟各种机械冲击,而发射点火、飞行过程中预定功能部件的分离和分系统试验往往必须在几秒钟内完成,因此需要高速摄像系统进行记录和分析。高速摄像机采用的是美国Phantom公司的V12型号,每秒钟拍摄速度可达6000帧。目前工作中使用的高速摄像系统采用的摄影镜头卡口为NikonF卡口,这是一种20世纪八九十年代应用的机械摄影镜头,镜头的变焦和调焦都是手动调节,通过观察取景器进行构图和对焦。但是,在某些特定环境,例如真空环境或者恶劣环境下应用高速摄像机时,需要对摄像系统进行密封防护,这就造成接触镜头困难。自动镜头价格昂贵,为了降低成本,解决手动镜头操作不便这一具体问题,设计出了可以对老式手动机械镜头进行电力驱动的系统,使之可以适应新的特定工作环境。
由单片机来控制步进电机的应用非常广泛,目前在现代军事、精密机械加工、航天航空等领域此类应用已经越来越深入。用80C51单片机来控制步进电机的转动,进而驱动镜头调焦环的扭转,可以实现自动/半自动调焦的功能。
1系统硬件设计
1.1基于单片机的控制系统设计
单片机是整个电路设计中的核心装置,其主要功能为产生脉冲,从而控制步进电机工作。设计可以用软、硬件结合的方式,传统的环形分配器由软件部分替代,可以提高效率,使单片机实现最优控制。基于单片机的强大功能,可以设计出外围电路,由外围电路产生脉冲,控制步进电机,并处理电机驱动电流检测模块检测到的电流值[1],再将检测内容通过数码管显示出来。
系统的核心采用51系列单片机,完成测距数据判读、步进电机控制、反馈信号比较等工作。外围电路包括AD/DA转换、数据指示、手动输入接口、电机驱动等。利用专业的电机驱动模块1298构成整个系统的驱动单元。控制步进电机转动的脉冲信号电流是通过单片机的软件部分进行编程输出的,步进电机的旋转角度与脉冲的个数成正比[2]。步进电机可以进行正向、反向转动调节,其转动方向与励磁脉冲产生顺序有关。
单片机同时负责处理安全模块中驱动电流检测模块反馈的电流值[3],并利用数码管将电机转速、转动方向显示出来。本系统采用了较为常见的五线四相步进电机,以实现对镜头调焦环的驱动。根据选定的步进电机相数,确定80C51单片机所需的相位信息。一般的步进电机需要12V左右的电压,对额定电压的要求不高,但需要8A左右的电流,因此要在单片机和步进电机之间增加隔离电路和放大电路,以实现系统预期功能。
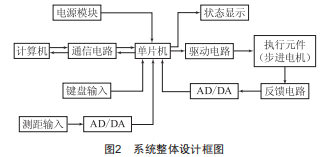
单片机的控制系统框图如图1所示。

1.2系统整体设计模型
系统组成还包括测距器、编码盘、反馈电路、手动调节接口和相关支撑结构等。其中测距器与镜头同轴安装,采用超声波或激光测距模块,为镜头驱动系统提供数据支持,步进电机经过齿轮减速和扭矩放大后,通过橡胶齿轮驱动镜头的变焦环和聚焦环,在步进电机的输出轮上加装编码盘,输出轮的编码盘与镜头机械调焦环上的距离标尺应存在对应关系,安装前通过确定场景对距离和视角进行标校,找出每种镜头存在的不同的对应关系,通过分支程序进行选择,以适应不同的镜头工作。测量出旋转的角度,经过A/D转换后作为反馈输入至单片机,以形成闭环控制系统。系统整体设计框图如图2所示。
1.2.1系统输入/输出单元
系统输入的功能是便于设置调节步进电机的系统参数,使系统操作更为灵活方便,输入设备可以使用键盘。显示设备选用数码管,用于显示当前的控制状态和电机运行状态。
1.2.2通信电路
通信电路是控制单片机与计算机通信、用来编程的电路部分,通常包括USB接口转串行通信电路、标准串行通信电路、看门狗模块等,本设计中采用成熟的电路模块。
1.2.3测距单元
在实际应用中,需要测量得到试验件到摄像机靶面的距离。
本文选择HC-SR04超声波测距模块进行测量输入,超声波测距的优势在于其指向性好,可以传输较远距离,不容易受周围环境影响,传播时间易于计算。同时,超声波传感器模块还具有结构简单、性能可靠、成本低、易于集成的特点[5],因而在工程中应用广泛。
如图3所示,超声波测距模块包括超声波发射单元及超声波接收单元等。作为核心的控制系统,单片机在测量过程中输出一个约40kHz的脉冲信号,驱动超声波发射器发出超声波脉冲,同时通过单片机计时器进行计时。超声波遇到目标后反向回传,超声波接收器接收到空气中回传的超声波,计时器停止计时。此时可知超声波从发射到接收的时间参数t,进一步可计算出传播距离,即镜头靶面到目标的距离。HC-SR04超声波测距模块如图4所示。

超声波测距模块的工作原理:通过设定好的单片机I/0口给HC-SR04超声波测距模块的触发口发送一个不小于10μs的高电平信号,超声波测距模块收到触发信号后会通过发射端口发送8个40kHz的方波信号,同时检测是否有信号返回,当有信号返回时,通过超声波测距模块的ECH0端口输出一个高电平信号,从ECH0端口检测到的高电平信号的持续时间即超声波信号从发射端到被测量物体由发射到返回的时间,由此可利用以下公式计算从超声波模块到被测量物体的距离:

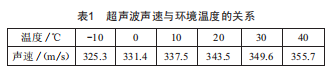
超声波在空气中的传播速度与当前环境温度有关,环境温度每升高1℃,声速约加快0.6m/s,表l给出了超声波声速与环境温度的关系。由于本文只涉及常温环境,所以只列出了-l0~40℃的数据。
超声波测距模块的触发接在单片机的P2.1管脚上,ECH0接在单片机的P3.2管脚上,以下是全局变量中关于测距模块的管脚定义:

通过对环境温度与超声波速度的关系进行拟合计算,可以得到以下经验公式:
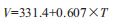
式中:V为当前环境温度声速:7为当前环境温度。
1.2.4步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件[7],本系统选择四相八拍步进电机28BYJ-48。使用脉冲控制步进电机运行,如果控制脉冲连续施加,步进电机也会不间断运行。四相步进电机可以在不同的通电方式下运行,本系统选用的步进电机按如下方式运行,即正转时为A-AB-B-BC-C-CD-D-DA顺序,反转时为DA-D-CD-C-BC-B-AB-A。通电控制脉冲的顺序决定了A、B、C、D相何时通电和断电。每发一个脉冲给步进电机,它就转一步,步进电机的转速与两个脉冲的间隔时间有关,间隔越短则步进电机转得越快。因此,调整单片机发出脉冲的频率,就可以对步进电机进行调速设置。
1.2.5驱动电路
步进电机的驱动选用达林顿驱动器ULN2003。由于单片机接口信号需经过放大后才能连到相应的电机接口,因此通过ULN2003起到信号放大的作用。当键盘发出前进或后退指令后,经过单片机的处理,发出高速脉冲给步进电机的驱动电路,步进电机根据脉冲数精确运转。
本文中,28BYJ-48型步进电机采用四相五线制,通过ULN2003驱动芯片连接到80C51单片机的P1.4~P1.7输出管脚上,采用四相八拍工作方式,以下给出四相定义全局变量:

单片机驱动步进电机的基本原理:从单片机的输出管脚按需要发送方波脉冲信号,经过ULN2003芯片放大后驱动电机旋转。本文中选用80C51单片机P1口的4、5、6、7四个管脚输出方波信号,A1、B1、C1、D1为定义好的全局变量。stop一flr为停止按键按下信号。
步进电机的速度计算公式为:
运转速度g(脉冲频率×60/步进电机分割数)/减速比64步进电机分割数g360/6.625
四相八拍步进电机运行时,Ng8:齿距角:Oag2π/Z,其中Z为转子的齿数:步距角(为转子走一步转过的角度):OzgOa/Ng2π/NZg360/(8×50)g0.n°,则步进电机转一圈所需步进数:360/0.ng400。
1.2.6反馈电路
反馈电路由光栅码盘、光栅识别器和光电转换电路构成,码盘是反馈单元重要的组成部分,是一种测量角位移的数字编码器,光栅识别器检测码盘转过的步数,通过转换电路变换后,将测量到的镜头转角反馈给单片机。
2系统软件程序设计
硬件平台设计完毕后,需要根据硬件电路对单片机进行系统编程,以满足操作和控制需求,保证各部分电路可以根据控制信号正常进行工作。
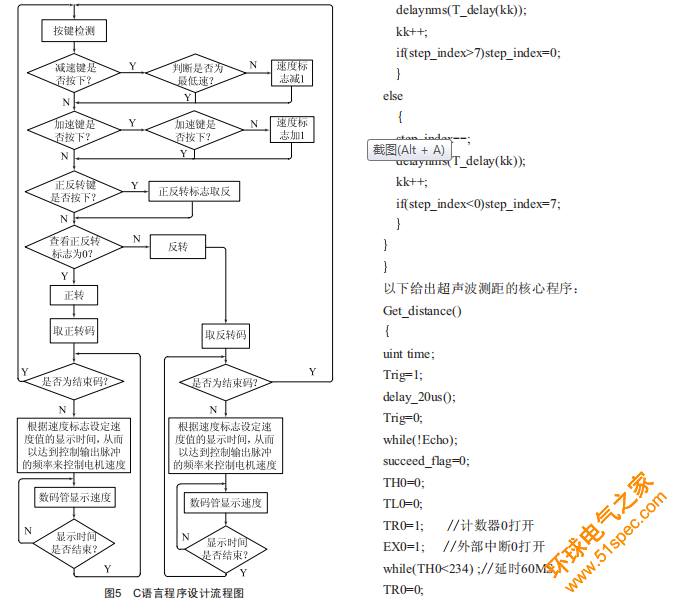
步进电机应用C语言程序设计流程图如图5所示。利用实验板上的独立按键控制步进电机正转、反转、加速、减速。驱动方式采用一相励磁,即4条信号线每次只有一个为高电平,在实验板数码管上象征性地显示转速。
以下给出步进电机驱动的核心程序:

3电机负载程度分析
电机负载与减速器、传动部分和镜头调焦环的阻尼有关。
机械镜头的调焦环是安置在镜头外侧与镜头外径尺寸相当的一个旋转部件,不同的镜头尺寸不同,通常从最近对焦距离调整至无穷远需转动180°~270°。
使用NikonAF80-200mm摄影镜头,橡胶齿轮为117齿,步进电机齿轮为14齿,电机传动比为1:8.4。本文镜头从焦距最远端至最近端旋转约108°,步进电机旋转约160转。
4试验结果
电力驱动系统全图和试验现场照片分别如图6和图7所示,在试验现场温度为25.6C、测量距离为3.16m的情况下,电机运动步数为5568步,此过程用时14s。

图6系统全图

图7最小系统调试现场图
5结语
本文详细介绍了基于单片机控制步进电机的手动镜头电力驱动系统,系统可在密封罩内使用,以应对特殊环境。采用80C51单片机作为控制核心,利用其将按键电路和显示电路结合起来,组成一个操作方便、交互性强的控制系统。系统软件采用C语言编程,具有易维护性,可以根据用户不同需求对软件进行少量修改,使系统功能得到进一步改善,使用、维护成本低于自动镜头。另外,将来如采用激光测距模块取代超声波测距模块,则能进一步扩大系统适用范围,比如在真空及水下环境应用,此方面的研究具有实际工程意义,可以进一步深入开展。
下一篇: PLC、DCS、FCS三大控
上一篇: 基于CATIA GSD的折叠


