
发布日期:2022-10-09 点击率:115
引言
为了满足在各种工况下,机器人的电机和减速器都能正常工作并且发挥其最大性能,需要对以下参数进行校核对比,如电机的最高转速、最大转矩、最大转动惯量、功率等,以及减速器的额定扭矩、启停容许扭矩(即加减速时允许的最大扭矩)、容许弯矩、瞬间最大容许弯矩、传动比等。通过动力学仿真分析校核以上参数,以初步确定两者选型,再以大量的实验数据作为对比,最终确认电机与减速器的选型。
1动力学研究方法
常见的机器人动力学研究方法有以下几种:Newton-Euler(牛顿-欧拉法)、Lagrange(拉格朗日法)、Gauss(高斯法)、Kane(凯恩法)及Roberson-wittenburg(罗伯逊-魏登堡法)等,各种方法都有各自的特点。由于机器人动力学方程相当繁冗,想以手工计算求解整个空间位置内运动关节的力矩分布情况或是仅仅求解一条路径上的力矩都显得极为困难。即使利用Matlab求解矩阵方程,其计算量也非常大,然而利用ADAMS分析计算功能对其进行仿真求解就显得简便许多,该软件的求解器采用多刚体系统动力学理论中的Lagrange方法来建立系统动力学方程,对虚拟机械系统进行动力学分析,输出位移、速度、加速度和反作用力、力矩等曲线。
2动力学仿真方法
机器人电机与减速器的选型就是对机器人各轴所需最大速度、最大转矩、最大功率关系的求解。对于机器人各关节峰值转矩7max的求解,文献提出了无路径搜索理论,即在机器人全局范围内列举出所有可能的试验点进行搜索,求解7max,其特点是无时间、无路径、面向整个空间。然而在样机设计阶段,可以用有路径搜索对其求解,即结合经验和机器人实际操作情况,选定一些工作路径(该路径位于工作空间的极限位置,代表各轴的极限工作状况)进行动力学仿真,求解7max从而简化问题,缩短研发周期。
有路径搜索的思路为:根据理论力学知识可知,电机转矩需要平衡杆件自身重力矩7g、惯性矩7a等。其中重力矩和惯性矩所占比例最大,其余可忽略不计,即7max=7g+7a。因此,只需考虑在何种工况下,机器人各轴的重力矩和惯性矩叠加起来最大,则电机和减速器需要在这一最大值下能够保持最大速度稳定运行即可。
2.1虚拟样机的建模与简化
使用Soli+words软件进行建模,装配成机器人零位状态,并进行以下简化:(1)各转轴运动时相对静止,且密度相同的零件可以建模为一个零件体:(2)把各个减速机按比例分为两部分,一部分和电机相连接,另一部分和输出端零件相连接。检查装配模型干涉情况和相对位置、杆长参数、零件质量属性等。
2.2虚拟样机模型的导入与设置
将模型另存为xt格式并在ADAMS软件中打开,新建模型,设置统一单位,设置力矩的单位为牛米,选择通过设置零件密度赋予零件质量属性等。在konneCtors中选择设置零件间的约束关系,例如底座与地面设置为固定约束[3],各关节相对运动的减速器部分设置为旋转约束。约束设置完成后,根据电机个数,在各关节相对运动处添加Motion。
2.3驱动函数的设置
选择所需设置的Motion,在cTye中选择peloCitT,在FunCtion(time)中输入驱动函数ScEP(time,0,0+,1.5,150+)+ScEP(time,2.5,0+,4,-150+),此函数表示0~1.5s期间,该关节由速度为0o/s逐渐加速到150o/s:1.5~2.5s期间,保持150o/s速度转动:2.5~4s期间,速度由150o/s逐渐减速为0o/s。加减速时间主要取决于各厂家机器人程序的设定。为了求得最大的转矩,需要满足最大重力矩与最大惯性矩的叠加,因此机器人位姿要求达到极限状态,速度要求达到最大速度。
2.4仿真与数据处理
选择Simulation,设置仿真时间为4,仿真步数为400,开始仿真。选择Results-PostyroCessor,在表格的数据源SourCe中选择0bjeCts,导出对应Motion的Elementcorque和AngularpeloCitT等数据曲线。根据导出的数据曲线与传动关系,可以得知机器人在某一位姿和速度下,电机所需输出的转矩与速度、减速器的受力情况,以此来校核电机和减速器的选型。
3仿真数据与实验数据对比
选择六关节机器人为实验对象,对比相同工况下第二关节所需输出最大转矩的仿真结果与实验结果。对于J2关节的仿真,设置如图1位姿作为初始位姿,即机器人大小臂伸展至最远处,使得机器人整体的质心偏离J1轴回转中心达到最大值,并使J2轴在较短的时间内反重力方向旋转加速到速度最大值,此时电机所需输出转矩最大。

图1J1轴仿真的位姿图
仿真结果(图2)最大为转矩为1268N·m,根据传动效率与模型简化误差,取65%传动效率,除以105传动比,则电机所需输出转矩为18.6N·m。实验测试结果(图3)显示启动时最大电流为27.23A,电机额定电流为11.2A,额定转矩为8N·m,则此时电机输出最大转矩约为27.23/11.2×8=19.45N·m,低于电机最大转矩24N·m。
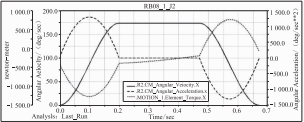
图2J2轴仿真数据结果
通过数据对比可知,此种工况下仿真数据结果与实验数据在换算后结果较为接近,误差率在10%以内,因此后期选型优化可参照仿真分析结果。
4结语
本文基于理论力学基础,考虑机器人各轴相对运动时对于各轴电机和减速器选型的影响,运用ADAMS软件进行机器人动力学仿真分析,并通过实验数据结果论证了仿真结果的可靠性,从而简化和优化了机器人电机和减速器的选型。
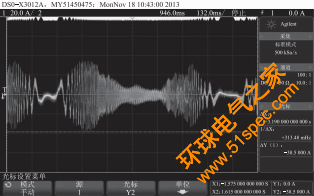
图3J2轴实验数据结果
下一篇: PLC、DCS、FCS三大控
上一篇: 生物制药企业电力能源


