
发布日期:2022-04-20 点击率:31
1控制任务
试验诊断平台的控制系统设计要求如下:
(1)根据现场装调人员指示,操作人员发出伺服电动缸动作指令,4个伺服电动缸在总行程范围内单独动作,在行程极限位置可靠停止:
(2)控制箱应具备每个电动缸的行程显示、动作指示功能,且要求操作简单,便于搬动。
2控制对象分析
试验诊断平台如图1所示。
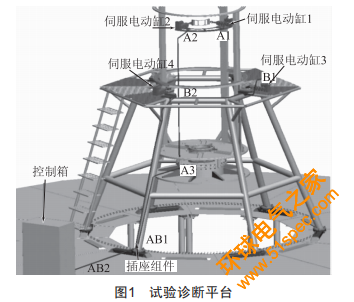
上位机操作系统所要控制的是乐星迈克彼恩L7S系列的标准I/O型伺服驱动器,该驱动器可根据与上位控制器的连接方式,以力矩、速度、位置模式进行运行,并可根据参数及I/O输入接点信号,切换运行模式。在完成位置控制功能的条件下,其模式选择对上位控制器的功能要求有较大区别。其中,力矩模式对上位控制器要求最高,需完成位置环与速度环控制。而位置模式对上位控制器要求最低,但同样不会影响定位精度,其精度取决于伺服电机编码器反馈精度及电动缸机械精度。因此,考虑简化上位机功能,使用伺服驱动器与电动缸APM交流伺服电机构成快速、准确定位的全数字位置伺服系统。
3控制系统方案设计
根据对控制任务以及被控对象的分析,控制系统应提供一个友好的人机界面,能完成对4个伺服电动缸的半闭环位置控制,操作模式具有JOG连续运转,JOG步进点动与电子手轮方式,伺服电机启动/停止可S形加减速,电机使能与刹车控制等功能。
由于使用的是交流伺服位置控制系统驱动,根据L7S系列标准I/O型伺服驱动器端子输入位置运转模式接线,上位控制系统需带PTO脉冲串输出)的可编程开发运动控制器、运动控制卡或PLC以及能与控制器或控制卡通信连接操作的上位人机界面HMI触摸屏。
3.1基于四轴运动控制型PLC构成的控制系统
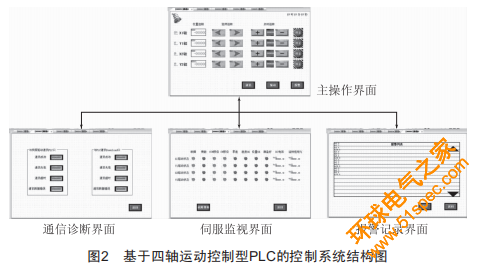
整个控制系统包括电源、信捷TH765系列HMI触摸操作显示屏、信捷xDM-32T-C四轴运动控制型PLC、电子手轮、L7S系列标准I/O型伺服驱动器等。HMI触摸操作显示屏、运动控制型PLC及L7S伺服驱动器通过串行通信网络MODBUS-RTU协议构成监控系统。其系统结构如图2所示。
3.2人机界面设计
信捷TH765系列HMI触摸操作显示屏通过Touchwin编辑软件可快速组态人机界面,实现多个界面,如图3所示,包括操作与位置显示界面、伺服驱动器状态界面、报警与历史记录界面等。

4应用
采用AP斜面操作台集成控制系统,操作平台如图4所示,主要分为HMI触摸操作显示屏和电子手轮两部分。电子手轮左侧为轴选择旋钮,分为五档一oFF、x1、Y1、x2、Y2:电子手轮右侧为倍率选择旋钮,分为三档一x1、x10、x100。置于oFF档时,手摇金属码盘无效:置于相应轴时,电子手轮手摇金属码盘可顺时针和逆时针操作,对应轴前进和后退。

图4操作平台
5结语
本文所介绍的国产信捷xDM系列运动控制型PLC,集运动控制功能与普通PLC功能于一体,最多可支持10轴脉冲输出,可实现两轴联动,既支持普通运动控制指令,如圆弧、直线插补等,又支持平面转换指令,可进行X-y、y-Z、X-Z等的两轴联动转换,简单易行,可靠性高,对实现多轴运动控制具有一定参考价值。
下一篇: PLC、DCS、FCS三大控
上一篇: 单侧电源网络相间短路


