
发布日期:2022-10-09 点击率:91
有关步进电机的知识,步进电机可以将电脉冲信号转变为角位移或线位移,那么步进电机的驱动方式有哪些,下文介绍了步进电机的常用术语及实现代码,一起来学习下。
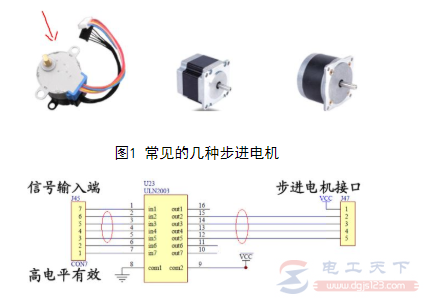
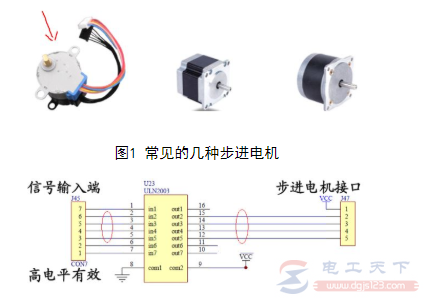
一、步进电机
步进电机是将电脉冲信号转变为角位移或线位移的电动机,在非超载的情况下,电机的转速、停止的位置只与脉冲信号的频率和脉冲数有关,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,其旋转是以固定的角度一步一步运行的。
步进电机可以通过控制脉冲个数来控制角位移量,达到准确定位的目的,同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而进行调速。
二、常用术语
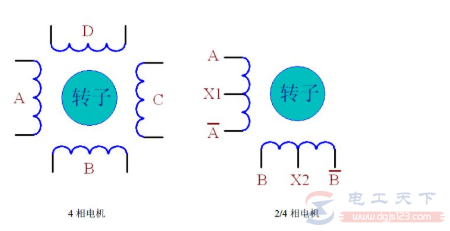
1、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
2、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
三、驱动方式
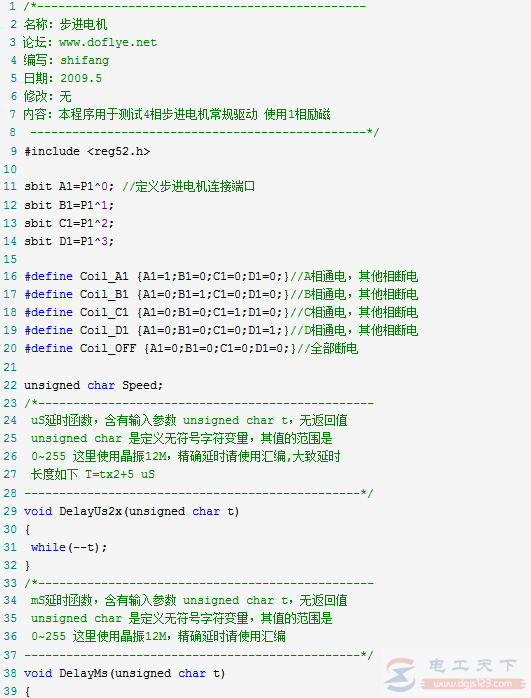
1、1相励磁法:每一瞬间只有一个线圈相通,其它休息。(优点)简单,耗电低,精确性良好。(缺点)力矩小,振动大,每次励磁信号走的角度都是标称角度。
2、2相励磁法:每一瞬间有两个线圈导通。(优点)力矩大,震动小。(缺点)每励磁信号走的角度都是标称角度。
3、1-2相励磁法:1相和2相交替导通。(优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍)
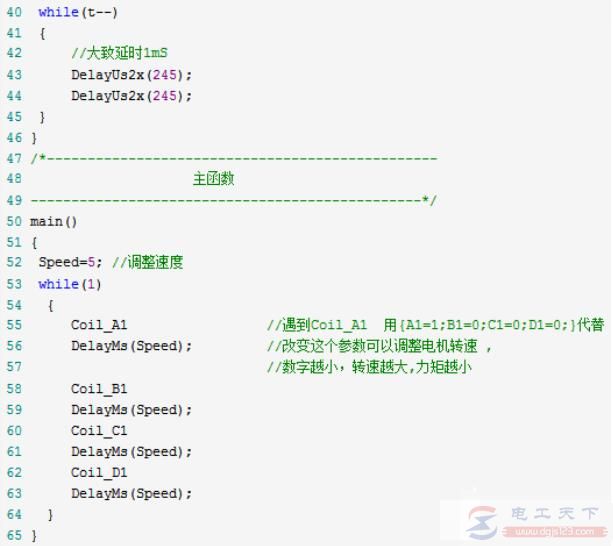
四、实现代码
下一篇: PLC、DCS、FCS三大控
上一篇: 12v和60v逆变器效率对

型号:2011400034
价格:面议
库存:10
订货号:2011400034
型号:103H8223-6340
价格:面议
库存:10
订货号:103H8223-6340
型号:SM2862-5151
价格:面议
库存:10
订货号:SM2862-5151
型号:103H8222-6340
价格:面议
库存:10
订货号:103H8222-6340
型号:103H5208-0410
价格:面议
库存:10
订货号:103H5208-0410
型号:P542-M481U-G17L82
价格:面议
库存:10
订货号:P542-M481U-G17L82


