
发布日期:2022-10-09 点击率:130
分享一个步进电机驱动电路图,步骤电机驱动电路的电路鸨,各部分电路的功能说明,包括速度判别电路,过流、超温检测电路,各相绕组驱动电路等。
步进电机具有快速启停、精确定位的特点,在数字控制领域经常使用步进电机作为位置控制的执行机构。
步进电机在快速运行中,要求驱动电路提供给步进电机绕组的驱动电流尽可能地接近其技术指标要求的数值,以产生足够的转矩.由于步进电机是感性负载,当运行速度提高后要提高绕组的工作电流,必须提高电源电压.实际应用中,常采用的控制方式是高低压恒流斩波控制。
在笔者给西北轴承厂改造磨床的过程中,设计了一种实用的步进电机驱动电路,它可以驱动75BF003-130BF003四种型号的三相六拍反应式步进电机,最高运行频率每分钟15 000步。
该电路除具有恒流斩波的特性外,还具有过流保护和超温保护的功能.经过实际应用,表明电路的可靠性很高,从未发生由于电机故障而烧坏大功率管的问题。步进电机驱动电路图
1、电路的结构
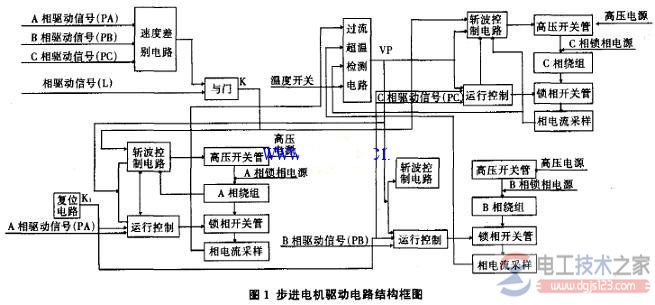
电路(图1)由速度判别电路,过流超温检测电路,A、B、C相驱动电路和电源组成.在该电路中,有单片机输出的A相驱动信号(PA)、B相驱动信号(PB)、C相驱动信号(PC)和锁相驱动信号(L),均为低电平有效.驱动步进电机的高压电源采用AC70V整流滤波后供给,锁相电源采用AC4.5 V半波整流后供给。
另外,电路还需要的+12 V和+5 V直流电压采用对AC10V和AC5V经过二极管整流滤波后获得,数字电路所需要的电源通过板间接口J401由主机提供。
2 各部分电路介绍
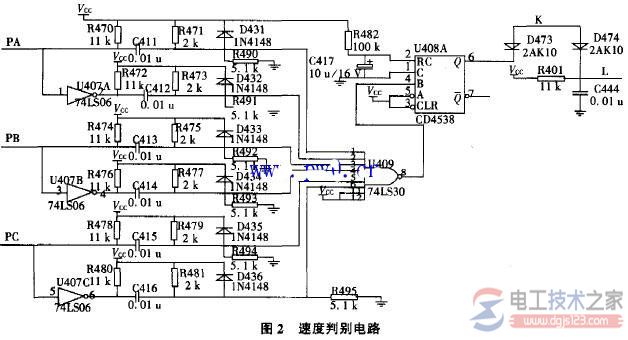
2.1 速度判别电路
速度判别电路的核心是一片可重触发单稳CD4538(图2).当单片机控制步进电机运行时,首先将锁相驱动信号L置为高电电平,随后PA、PB、PC按照A→AB→B→BC→C→CA→A(或AC→C→BC→B→AB→A→AC)的顺序依次轮流出现低电平,从而驱动步进电机一步一步地运行.由于在运行过程中,PA、PB和Pc信号至少有一个会出现跳变(上升沿或下降沿),而这种跳变经过由电阻和电容(如R470、C411、R471、R490和D431等)组成的微分电路变成一个负脉冲加到8输入端与非门U409的输入端,进而在其输出端产生一个正脉冲触发单稳U408A;U408A的输出Q与锁相驱动信号L经过由锗开关二极管D473、D474构成的与门去控制A、B、C三相驱动电路的斩波电路。
由于U408A的暂态时间大约是1 S,因此当步进电机的运行速度低于每秒钟l步时,速度判别电路先输出约1 S的高电平,使各相驱动电路进行约1 S的恒流斩波动作,使步进电机迅速到位,随后转到锁相状态(步进电机各相的电流降到其工作电流的大约一半),以降低步进电机的功耗。
2.2 过流、超温检测电路
过流、超温检测电路的核心是由电压比较器LM393(U403A)构成的施密特触发器(图3)。
在该电路中,锗开关二极管D437-D440构成了1个或门,A、B、C三相电流检测电阻上的电压V1A、V1B 、V1C经过该或门加到施密特触发器的输入端(U403A的3脚)。
当这3个电压中有任意一个超过U403A的2脚设定电压+0.2 V(锗二极管的正向压降)时,由电压比较器LM393构成的施密特触发器翻转,其输出为高电平;这个高电平一方面通过D441的正反馈使其输出维持为高电平,另一方面其输出经过U407E反相(VP信号)将A、B、C相驱动电路的高压开关管和锁相开关管关断,从而保护大功率三极管的安全。
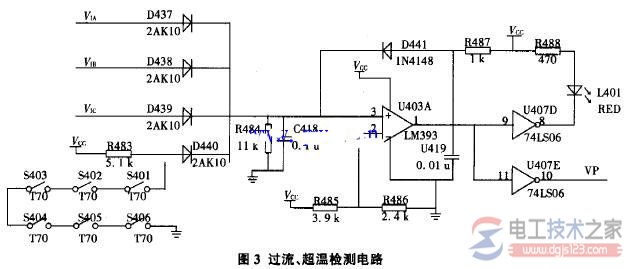
S401-S406为安装在6个大功率管上的常闭温度开关,其动作温度为70℃.当6个功率管中的任意一个管壳温度超过7O℃时,温度开关断开,高电平加到施密特触发器的输入端,从而使VP为低电平,将6个大功率管关断,进而保护大功率三极管的安全。
该电路一旦翻转,必须关闭电源才能够恢复,这样就避免了一旦外部条件恢复正常电路自动启动,对操作工人产生伤害情况的发生。步进电机驱动电路图
2.3 各相绕组驱动电路
步进电机A、B、C三相绕组的驱动电路结构完全一样,现以A相驱动电路为例介绍其工作原理.在图4中,A和A'间接人步进电机的A相绕组,V1A是A相绕组取样电阻上的电压,该电压的大小反映了A相绕组中电流的大小。
R411和C401构成上电复位电路,当电路刚上电时,K1出现一个短暂的低电平,从而关闭锁相开关管BG405,避免步进电机A、B、C三相同时通电情况的发生.T401为脉冲变压器,采用Φ35 mm的铁氧体磁罐制作。
在这里之所以将高压开关管BG404的驱动采用变压器耦合是为了避免前级驱动电路出现故障时,造成高压开关管长期导通,进而烧毁现象的发生。
大功率开关管BG404和BG405采用摩托罗拉公司生产的MJ13333,其耐压400 V,IcM为20 A,PcM为175 W.75BF003-130BF003型步进电机的绕组电流为3~10 A,故选用MJ13333完全可以满足需求.MJ13333上装有指叉形散热器,机箱中安装4个轴流风扇解决系统的散热问题.步进电机各绕组运行电流的调整可通过改变相电流取样电阻R417和R419的阻值来实现.锁相电流的改变通过调整锁相电源的电压来实现。
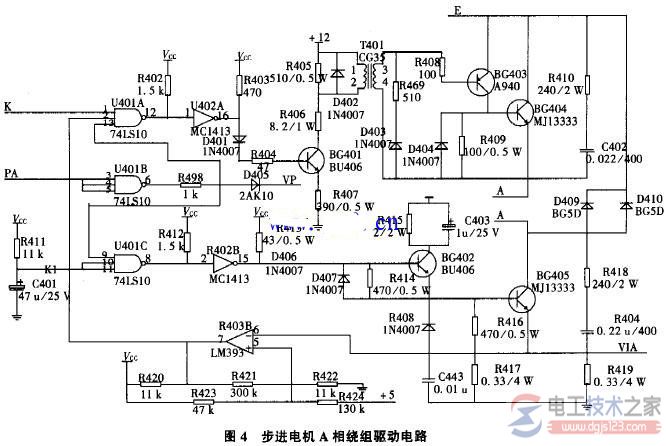
在正常工作中,K为高电平,当PA为低电平时表明A相绕组需要加电。
这时,由于A相绕组中的电流为0,VIA的电压也为0,由电压比较器LM393(U403B)组成的施密特触发器输出高电平。同时由于PA为低电平,故三输入与非f-j U401A和U401C的输出为低电平,进而使锁相开关管BG405和高压开关管BG404导通,近100 V的直流电压加到A相绕组上。
当A相绕组中的电流超过6 A(以110BF003三相六拍反应式步进电机为例),U403B输出变为低电平,从而使高压开关管BG404截止,这时A相绕组仅由锁相电源提供电流,绕组中的电流开始下降,当A相电流下降使VIA的电压小于U403B正输入端(5脚)的电压,高压开关管BG404重新导通,100 V高压重新将A相绕组的电流提高,如此反复形成了恒流斩波的工作方式。
这里,电阻R421的存在使U403B的状态转换产生一定的回差,避免了U403B的连续高速翻转,改变R421的大小,可以改变斩波的频率。
在锁相状态时,由于锁相驱动信号L为低电平,K信号也为低电平,故而高压开关管截止.若这时PA为低电平,则锁相开关管BG405导通,A相绕组由AC4.5 V半波整流后的锁相电源提供电流,此时绕组电流约为其工作电流的一半.这样可以降低步进电机的功耗,进而减少电路和电机的发热量。
一旦出现绕组短路或高压开关管击穿的情况,VIA的电压会迅速达到2.1 v(对应绕组电流约13 A),这时过流检测电路会立即使VP为低电平,马上使锁相开关管截止,避免电路故障的进一步扩大,保护驱动电路和步进电机。
实际调试中,笔者曾将步进电机的绕组用导线短路,结果保护电路立即动作;关闭电源,拆除短路线后,重新接通电源,电路恢复正常工作。
下一篇: PLC、DCS、FCS三大控
上一篇: 常用电工电路之串联稳

型号:2011400034
价格:面议
库存:10
订货号:2011400034
型号:103H8223-6340
价格:面议
库存:10
订货号:103H8223-6340
型号:SM2862-5151
价格:面议
库存:10
订货号:SM2862-5151
型号:103H8222-6340
价格:面议
库存:10
订货号:103H8222-6340
型号:103H5208-0410
价格:面议
库存:10
订货号:103H5208-0410
型号:P542-M481U-G17L82
价格:面议
库存:10
订货号:P542-M481U-G17L82


