
发布日期:2022-05-20 点击率:74 品牌:组态王_Kingview
0 引言
射频识别技术(RFID)能够实现物与物之间无接触式信息传递,即阅读器通过天线与电子标签进行数据交互。目前广泛采用无源有芯或者有源有芯电子标签,但其成本较高,无芯片RFID标签应运而生。因目前RFID防碰撞算法主要针对有芯片标签[1-3],均基于阅读器主动控制标签休眠,而无芯片RFID标签内无IC芯片,只是拥有特定材质有限大小的结构,因此大部分RFID防碰撞算法在无芯片RFID的应用中失效。本文利用Carl E. Baum提出的极点展开法(the Singularity Expansion Method,SEM)[4-5]来研究标签散射场特性[6-8],进一步应用改进型矩阵束算法解决多个标签防碰撞问题,分析算法在无芯片RFID多标签识别中的有效性。
1 相关理论
1.1 散射电磁场的SEM建模
1971年Carl E. Baum将传统电路理论中用留数定理求解瞬态响应的方法推广到瞬态电磁场问题处理中,提出了SEM,其理论表明电磁波照射金属导体时,瞬态响应后期可以被看成一系列衰减复指数和的形式:

其中es(t)为后向散射的时域信号,M为极点个数,Ri是信号的留数,si为信号的复极点,一般取si=ai+jwi(ai取负数,称为阻尼因子或衰减因子;wi取正数,为自然谐振角频率)。由于散射信号是实数,所以极点总是以共轭对的形式存在。
同样,多标签散射场也具有相同特性,若查询信号频带覆盖了多个标签的自然谐振频率,由标签感应产生的后向散射回波信号电场es时域表示为:
式(2)和(3)中,r和t分别表示检测回波信号的位置和时间,M为所查询标签个数,em(Em)为第m个标签的早时响应,U(t)为单位阶跃函数,tm和Nm分别为第m个标签的后时响应开启时间和极点共轭对数目,第m个标签的第n个复极点和留数分别为sm,n和Rm,n。
在复频域中,信号的特征通过极点和留数来表征,而极点和留数的大小只与金属导体的形状有关,与激励源无关。所以标签结构与极点呈现出一一对应关系,标签的检测与识别的关键技术之一是从es(t)中提取信号的极点。
1.2 改进矩阵束算法(MPM)
目前,极点提取算法有多种,比如Prony方法、矩阵束算法[9-12]、短时矩阵束算法[13]等。实际情况中,Prony算法抗噪性能差,矩阵束算法采用内积形式研究极点提取问题,使抗噪能力有所提高。
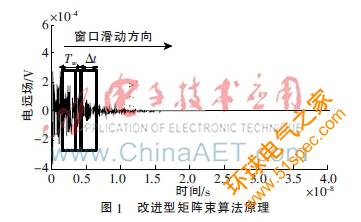
在多标签防碰撞算法中,对传统矩阵束算法进行以下改进:如图1所示,在散射场时域信号es(r,t)中加一宽度为Tw的虚拟窗口,窗口每次滑动?驻t,同时应用一次矩阵束算法(MPM)计算极点和留数,直到窗口内无数据。由于早时响应的存在,早时期间极点处于不稳定状态,而后时响应期间极点会保持稳定,根据稳定的极点识别出标签。
2 多标签防碰撞设计及仿真结果
2.1防碰撞标签结构的建立

为了研究无芯片RFID多标签防碰撞相关问题,利用方形开槽结构标签建立仿真模型,如图2所示(尺寸单位:mm)。槽的长度决定谐振频率和衰减因子,标签1尺寸:L=45,H=10,L1=27,L2=30,L3=33,w=0.2;标签2尺寸:L=30,H=10,L1=18,L2=20,L3=24,w=0.2。
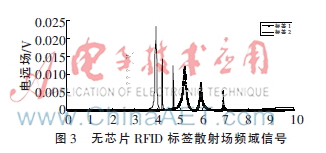
实验采用电磁仿真软件FEKO 5.5分别对标签1标签2进行仿真,得到其在50 MHz~10 GHz频域散射场信号数据,采样数据点数均为1 024。如图3所示,标签1散射场极点分布大约在5.2 GHz、5.9 GHz、6.9 GHz,标签2散射场极点分布大约在3.95 GHz、4.2 GHz、4.7 GHz。最后将标签1和标签2同时进行仿真,并设置两标签间隔距离为2 m。
2.2 无芯片RFID标签防碰撞的实现
2.2.1 改进型矩阵束算法参数选择
利用改进型矩阵束算法提取散射场信号极点时,需要选择合适的窗口宽度Tw和每次滑动的宽度`4LSDHG55A3EE)B.jpg") t。窗口宽度Tw的选择可以根据采样点数N和时间总长T来决定,即Tw=T/N,此处Tw取0.04 ns较合适。经过多次实验,一般
t。窗口宽度Tw的选择可以根据采样点数N和时间总长T来决定,即Tw=T/N,此处Tw取0.04 ns较合适。经过多次实验,一般`4LSDHG55A3EE)B.jpg") t≤Tw时,极点提取的效果比较理想,此处
t≤Tw时,极点提取的效果比较理想,此处`4LSDHG55A3EE)B.jpg") t取0.01 ns。窗口宽度Tw和滑动宽度
t取0.01 ns。窗口宽度Tw和滑动宽度`4LSDHG55A3EE)B.jpg") t的选取直接影响到极点提取的精度,也将会影响多标签识别的准确性。
t的选取直接影响到极点提取的精度,也将会影响多标签识别的准确性。
2.2.2 无芯片RFID多标签的识别
标签结构如图2所示的标签1和标签2的混合散射场时域信号如图4所示,应用改进型矩阵束算法提取其极点,获得极点的虚部与时间的关系(即谐振频率与时间的关系),如图5所示。
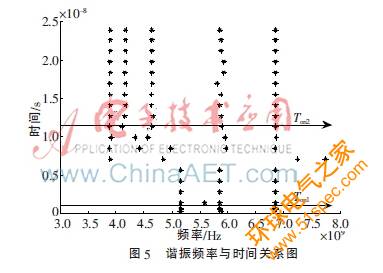
从图5中可以看出,早时响应期间(tTon2期间)。由此可知,根据标签后时响应开启时间Ton的不同,标签可以被准确区分,解决了后时响应开启时间不同的多标签防碰撞问题。
3 结束语
本文将矩阵束算法进行改进并应用于无芯片RFID多标签防碰撞的研究中,在研究防碰撞的同时找出了标签的后时响应开启时间,根据各个标签散射场后时响应开启时间的不同,从标签散射场的谐振频率和时间关系中,准确地识别各个标签。此种方法对无芯片标签的识别以及多标签防碰撞有一定参考价值。但是此种方法有一定局限性,即针对各个标签距离阅读器距离几乎相等(后向散射开启时间近似相同)时,标签将无法被准确识别.
下一篇: PLC、DCS、FCS三大控
上一篇: 一种基于RFID的涉密载


