
发布日期:2022-05-20 点击率:38
0 引言
伴随着我国经济和物流行业的飞速发展,货物的种类和数量也随之急剧增加,仓库工作人员的操作任务也变得更加繁重。电子拣选器的出现取代了现场纸质订单,将其安装在货物储位的货架上并与上位机(即PC机)进行通信,在货架上显示拣选信息,工作人员按照电子拣选器上的显示进行拣选作,实现拣选作业的无纸化,使得拣选作业具有现场监控、紧急订单处理和补货盘点通知功能。
目前,我国仓储管理采用的电子拣选器大多选用RS-485总线通信技术,这种通信技术的突出缺点是:RS-485总线只能构成主从式结构网络,网络的实时性和可靠性较差;多个节点同时向总线发送数据时,会导致总线出现短路而损坏某些节点。相较之下,CAN总线具有实时性高和可靠性高,数据传输速率快等优点,并且实现通信的硬件接口简单、系统的可扩展性好。相较于扫描条形码、二维码等信息获取方式,RFID(无线射频识别)技术具有读取信息快速便捷、可重复使用且使用寿命长、标签数据可动态修改等特点。在欧盟等发达国家,RFID技术早已应用于图书、零售业及档案管理等物品种类和数量复杂繁多的场合。
基于CAN总线和RFID技术的明显优势,设计一种基于CAN总线和RFID技术的电子标签,将其应用于仓储管理工作当中。它不仅克服了RS-485总线通信存在的问题,提高了拣选作业的准确性和实时性,并且随着RFID技术的加入,使得拣选作业更加准确、高效,使系统能够应用于更加复杂的货物管理中。
1 电子拣选器总体概述
1.1 CAN总线及RFID技术概述
CAN总线是一种支持分布式控制的串行口通信网络,在以下方面具有明显的优越性:(1)CAN总线采用非破坏性总线仲裁技术,可实现多节点同时向总线发送数据,提高了网络的可靠性和灵活性;(2)当节点发生持续数据错误时,该节点可自动关闭,不会对总线上其他节点的操作造成影响,提高了网络的稳定性。(3)CAN总线的通信介质为双绞线,信号传输采用差分电压方式,提高了抗干扰能力。
RFID是一项易于操控且适合于自动化控制的灵活性应用技术。
它的应用优势由以下几点体现:(1)识别速度快,可实现批量识别;(2)数据容量大,标签数据可动态修改;(3)应用范围广且具有良好的安全性。
条形码识别技术每次只能扫描一个条形码,条形码扫描器必须在近距离且无物体阻挡的情况下才能辨识条形码,与此相比,RFID读写器能够同时识别多个电子标签,实现货物信息的批量识别,且当电子标签进入读写器扫描范围,即能够透过纸张、木材和塑料等材质与读写器进行穿透性通信,提高了信息读写的效率。而CAN总线在传输数据时,每个数据帧的数据域最长为8字节,这种短帧传输时间短、受干扰率低,每帧都有位填充、CRC校验等检错措施,且在数据发送期间丢失仲裁或者由于出错而遭到的帧可自动重发。结合这两种技术,使得系统具有更好的数据传输效率和数据检错纠错能力。
1.2 电子拣选器工作原理概述
基于CAN总线与RFID技术的电子拣选系统由上位机作为主控机,由多个以MSP430单片机为微控制器的电子拣选器组成。根据仓库货物储存的实际需要,将烧写了ID号的电子标签终端安装在相应的货架上,上位机根据订单信息向电子拣选器发送相关命令和数据,相应的电子拣选器接收到上位机的命令和数据后,使指示灯闪烁并在数码管上显示需要拣选货品的相关信息。RFID读写器不断发出电磁波,在拣选完毕后按下确认键时,对附着在货物上的电子标签按照上位机发来的指令进行货物信息的修改,使得货物的实际存储情况能够与数据库的货物信息相匹配。电子拣选器会将确认指令反馈至上位机,拣选作业完成,等待上位机的下一步指令。
2 电子拣选器的硬件设计
电子拣选器是由微控制器最小系统部分、CAN控制收发部分、RFID读写器部分、供电部分、三色灯、数码管和按键等七部分构成。如图1所示为电子拣选器硬件结构框图。
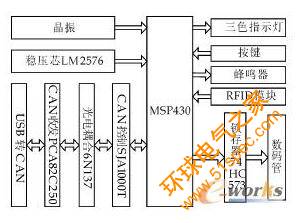
图1 电子拣选器硬件结构框图
2.1 MSP430
微控制器本设计所采用的微控制器选用MSP430系列中的MSP430F149,它是一种16位超低功耗、具有精简指令集的混合信号处理器。它具有更多的端口,拥有更好的功能扩展性,能使用户实现具有更多功能的系统,同时也可减小系统实现的复杂程度。如图2所示为MSP430最小系统结构框图。
它的超低功耗表现为在休眠模式下工作电流只有0.8μA,在2.2V、1MHz工作模式下电流只有280μA;它具有快速的指令执行时间,其采用的是16位的RISC结构,指令执行时间只需150ns,是传统单片机所不能比拟的;它有两个串口通信模块:USART0、USART1,这两个串口都可以利用软件设置为USART方式或SPI方式,能满足用户多机通 信 的 需 求;它 提 供 的 片 内FLASH为60KB,同时片内还提供较多的RAM,以便进行运算时处理。
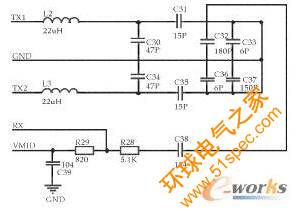
图2 MSP430最小系统结构框图
2.2 RFID模块设计
RFID模块主要由微控制器、无线射频收发芯片和天线电路三部分组成,其功能是通过RFID读写器,对附着在货物上的电子标签中的货物信息进行采集或修改,免去了纸录作业的繁琐。
2.2.1 RFID接口设计
此模 块 采 用NXP公 司 的MFRC522作 为RFID模块电路开发的核心芯片,MFRC522是一款高度集成的非接触式13。56 MHz射频收发芯片,其通信距离高达50mm,这取决于天线的长度和调谐。在此模块的设计中采用SPI接口方式完成MSP430控制器与MFRC522之间的数据传输。通过MFRC522芯片提供的4个引脚(MISO、MOSI、SCK、RST)来实现SPI接口电路。当MFRC522在与MSP430进行SPI通信时,MFRC522作 为从机:数据可以通过MISO引脚从MFRC522发回到MSP430中;数 据 也 可 以 通 过MOSI引 脚 从MSP40发送到MFRC522中。如图3所示为RFID接口原理图。
2.2.2 天线电路设计
RFID读写器通过天线电路向无源电子标签发射电波并产生磁场,从而实现对货物标签内数据的读写操作。如图4所示为天线电路设计原理图。
微控制器通过RFID读写器对货物信息进行读写时,天线的驱动是通过配置MFRC522内部相关寄存器,利用TX1和TX2引脚实现的。由于天线是低阻抗器件,与MFRC522芯片进行连接需设计匹配电路,其功能是使天线工作在13。56 MHz频段上。图2~图3中C31、C32、C33、C35、C36、C37组成了天线匹配电路。
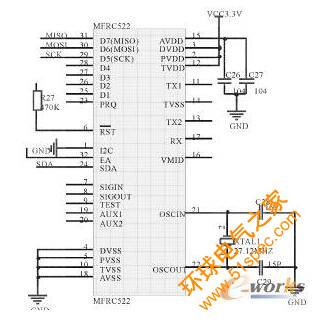
图3 RFID模块接口原理图
图4 天线电路设计原理图
2.3 CAN总线模块设计
实现CAN总线数据传输的硬件电路主要由两部分组成,即CAN总线控制电路和CAN总线驱动电路。
2.3.1 CAN
总线控制电路CAN总线控制器实现了CAN协议中最复杂的数据链路层功能,是CAN总线控制电路的核心器件。SJA1000是一种独立的CAN控制器,它具有一种新的操作模式-PeliCAN,此模式支持具有多种新特性的CAN2。0B协议。
SJA1000应用电路是由时钟电路、复位电路和模式选择电路组成的,复位和模式选择是由微控制器中的引脚控制的。CAN总线控制电路图如图5所示。
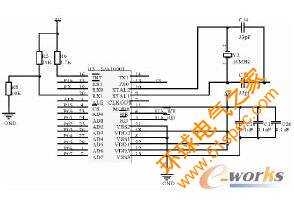
图5 CAN总线控制电路
2.3.2 CAN总线驱动电路
CAN总线驱动器实现了物理层的功能,它将控制器发送信号转变为符合CAN物理层标准的信号,并进行放大、传输到总线上;并且将总线上接收到的信号转变为控制器所能接收的电平信号。PCA82C250是CAN协议控制器与物理总线间的接口,它对总线提供差动发送能力,对CAN控制器提供差动接收能力。6N137为CAN隔离器,降低电平的高速转换带来的噪声,提高电路的抗干扰能力。如图6所示为CAN总线驱动电路图。
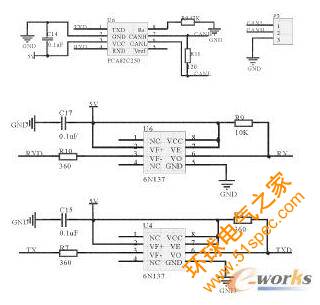
图6 CAN总线驱动电路
2.4 其他模块设计
2.4.1 供电电路
选用转换效率为70%~88%之间的稳压芯片LM2576,将输入的12V电压转换成5V电压,为CAN控制器提供电源电压;选用了AMS1117-3.3芯片将5V电压转换为3.3V,为MSP430微控制器、RFID读写器以及外围电路供电。
2.4.2 数码管模块
本设计中的数码管模块由三组两位共阴数码管组成,三组分别表示货物的种类、批次和数量信息(每组可显示0~99)。在与微控制器连接时,使用具有锁存的功能的集成芯片74HC573实现对数码管的驱动。
2.4.3 按键及三色灯模块
按键的作用是配合操作人员对货物进行出入库及盘点操作时,对货物数据进行修改或反馈。
按键分为四部分:一个确认按键,在货物管理结束时,作为最终确认按钮;两个操作按键,一个加键和一个减键,分别修改区号、列号、行号信息,配合确认按键使用;一个功能按键,配合加键和减键来完成对货物信息如种类、批次、数量的修改;一个硬件复位按键,在系统出现错误时进行复位。三色灯的作用是当下位机接收到上位机发送来的拣选命令时,对所执行的命令的内容进行提示,引导仓库操作人员快速准确的到达拣选位置。三色灯分为红、绿、蓝三色,分别代表出库命令、入库命令和盘点命令。
3 电子拣选器的软件设计
软件设计中首先要对一些位的定义及微控制器进行初始化操作,初始化结束后判断EEPROM是否为空,若为空就重新赋给地址值,若不为空则将EEPROM中的ID取出;接着对电子拣选器进行上电自检,并对上电检测回复的数据进行赋值校验,赋值结束后向上位机发送检测数据,然后接收上位机发送的数据并进行校验,校验成功就进入指令周期执行命令(出库命令、入库命令、盘点命令等),校验失败则进行判断是否发送错误命令,重新接收上位机发送的数据再进行校验,直到校验成功进入指令周期执行命令,并将执行后的数据显示在数码 管,执行结束后重新接收上位机发送的命令。
指令周期内上位机对电子拣选器的操作流程图及电子拣选器对电子标签的操作流程图如图7、图8所示。
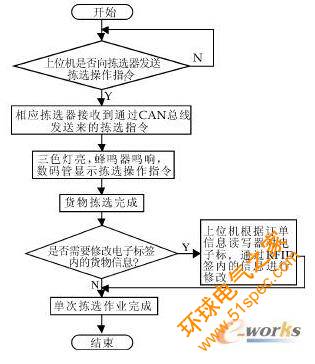
图7 上位机对电子拣选器的操作流程
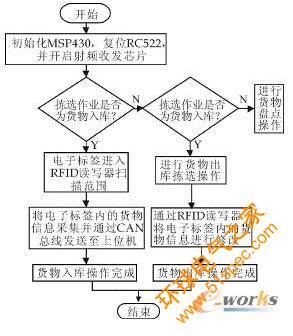
图8 电子拣选器对电子标签的操作流程
4 结束语
基于CAN总线与RFID技术的电子拣选器结合PC机组成的仓储管理系统增强了仓储货物信息的准确性和统一性,提高了仓储拣选作业的工作效率,加快了货物出库、入库的流转速度,增强了仓储管理系统的处理能力。由此看出,基于CAN总线与RFID技术的电子拣选器能够使得物流拣选作业更加高效和准确,从而满足现代物流行业的仓储管理系统的要求。该电子拣选器已经在西安某乳业公司的仓储管理中得到推广应用。
下一篇: PLC、DCS、FCS三大控
上一篇: RFID身份码发射器硬件


