
发布日期:2022-04-18 点击率:837 品牌:组态王_Kingview
电动机除了上述电动状态外,在下述情况运行时,则属于电动机的制动状态。在负载转矩为位能转矩的机械设备中(例如起重机下放重物时,运输工具在下坡运行时),使设备保持一定的运行速度;在机械设备需要减速或停止时,电动机能实现减速和停止的情况下,电动机的运行属于制动状态。
三相异步电动机的制动方法有下列两类:机械制动和电气制动。机械制动是利用机械装置使电动机从电源切断后能迅速停转。它的结构有好几种形式,应用较普遍的是电磁抱闸,它主要用于起重机械上吊重物时,使重物迅速而又准确地停留在某一位置上。
电气制动是使异步电动机所产生的电磁转矩和电动机的旋转方向相反。电气制动通常可分为能耗制动.反接制动和回馈制动(再生制动)等3类。
1.能耗制动
方法:将运行着的异步电动机的定子绕组从三相交流电源上断开后,立即接到直流电源上,如图所示,用断开QS,闭合SA2来实现。
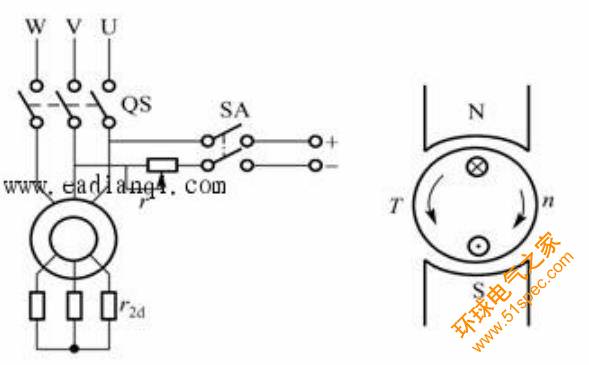
图 感应电动机能耗制动原理图
当定子绕组通入直流电源时,在电动机中将产生一个恒定磁场。转子因机械惯性继续旋转时,转子导体切割恒定磁场,在转子绕组中产生感应电动势和电流,转子电流和恒定磁场作用产生电磁转矩,根据右手定则可以判电磁转矩的方向与转子转动的方向相反,为制动转矩。在制动转矩作用下,转子转速迅速下降,当n=0时,T=0,制动过程结束。
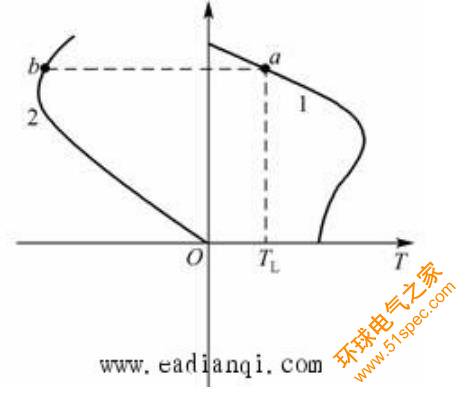
能耗制动机械特性图
动能转变为电能,消耗在转子回路的电阻上,所以称能耗制动。如图所示,电动机正向运行时工作在固有机械特性曲线1的a点上。定子绕组改接直流电源后,因电磁转矩与转速反向,因而能耗制动时机械特性位于第二象限,如曲线2。电动机运行点也移至b点,并从b点顺曲线2减速到O点。
对于采用能耗制动的异步电动机,既要求有较大的制动转矩,又要求定.转子回路中电流不能太大使绕组过热。根据经验,能耗制动时对于笼型异步电动机取直流励磁电流为(4~5)I0,对于绕线转子异步电动机取(2~3)I0,制动所串电阻r=(0.2~0.4)能耗制动的优点是制动力强,制动较平稳。缺点是需要一套专门的直流电源供制动用。
2.反接制动
反接制动分为电源反接制动和倒拉反接制动两种。
(1)电源反接制动
方法:改变电动机定子绕组与电源的联接相序,如图所示,断开QS1,接通QS2即可。
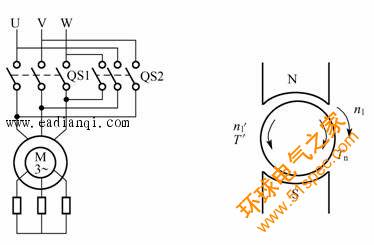
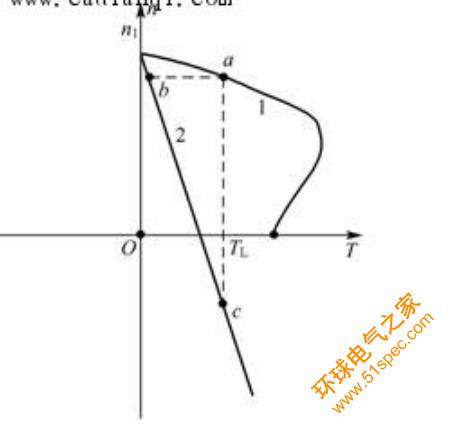
电源的相序改变,旋转磁场立即反转,而使转子绕 组中感应电势.电流和电磁转矩都改变方向,因机械惯性,转子转向未变,电磁转矩与转子的转向相反,电动机进行制动,此称电源反接制动。如图8.14所示,制动前,电动机工作在曲线1的a点,电源反接制动时,n1<0,n>0,相应的转差率s= >1,且电磁转矩T<0,机械特性如曲线2所示。因机械惯性,转速瞬时不变,工作点由a点移至b点,并逐渐减速,到达c点时n=0,此时切断电源并停车,如果是位能性负载需使用抱闸,否则电动机会反向起动旋转。一般为了限制制动电流和增大图 电源反接制动机械特性
>1,且电磁转矩T<0,机械特性如曲线2所示。因机械惯性,转速瞬时不变,工作点由a点移至b点,并逐渐减速,到达c点时n=0,此时切断电源并停车,如果是位能性负载需使用抱闸,否则电动机会反向起动旋转。一般为了限制制动电流和增大图 电源反接制动机械特性

制动转矩,绕线转子异步电动机可在转子回路串入制动电阻,特性如曲其线3所示,制动过程同上。
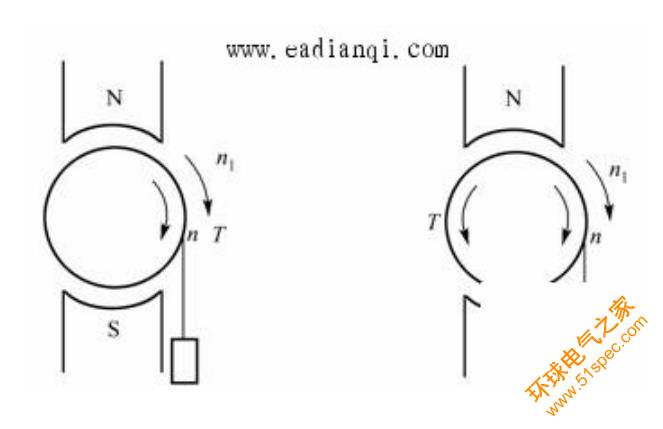
(2)倒拉反接制动
方法:当绕线转子异步电动机拖动位能性负载时,在其转子回路串入很大的电阻。其机械特性如图所示。
当异步电动机提升重物时,其工作点为曲线1上的a点。如果在转子回路串入很大的电阻,机械特性变为斜率很大的曲线2,因机械惯性,工作点由a点移到b点,因此时电磁转矩小于负载转矩,转速下降。当电动机减速至n=0时,电磁转矩仍小于负载转矩,在位能负载的作用下,使电动机反转,直至电磁转矩等于负载转矩,电动机才稳定运行于c点。因这是由于重物倒拉引起的,所以称为倒拉反接制动(或称倒拉反接运行),其转差率
 >1 图倒拉反接制动的机械特性
>1 图倒拉反接制动的机械特性
与电源反接制动一样,s都大于1绕线转子异步电动机倒拉反接制动状态,常用于起重机低速下放重物。
3.回馈制动
(a) 电动运行 (b)回馈制动
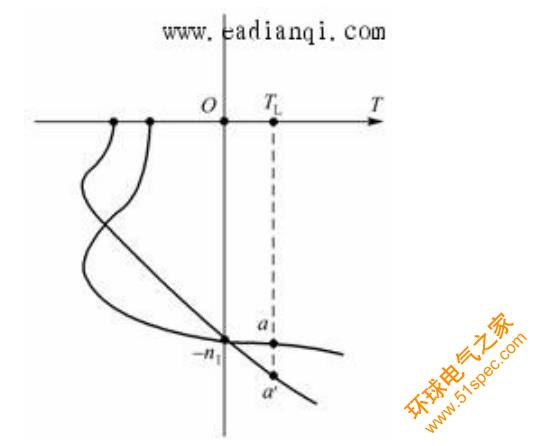
图 回馈制动原理图
电流和转矩的方向都发生了变化,如图(b)所示,转矩方向与转子转向相反,成为制动转矩。此时电动机将机械能转化为电能馈送电网,所以称回馈制动。
制动时工作点如图的a点所示,转子回路所串电阻越大,电动机下放重物的速度越快,见图中虚线所示a’点。为了限制下放速度,转子回路不应串入过大的电阻
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV


