
发布日期:2022-08-21 点击率:39
[汽车点评网 技术解析] 几乎每分钟都有人在交通事故中丧失生命,受伤的人更不计其数。此外,交通事故带来的经济损失也成了天文数字。因此,汽车制造商和零件供应商一直致力于避免交通事故的发生,即便不能完全防止意外,至少也要减少因交通事故所造成的伤害。汽车安全性能得到改善很大一部分都归功于汽车电子的发展。

对车辆碰撞和驾驶员反应之间关联性的分析显示,大量的交通事故都可以通过驾驶员及时发现危险并做出适当机动操纵而得到避免。为达到这项要求,我们可以为驾驶员提供适当的警告信号或让车辆配备自动的纵向及横向控制功能(驾驶员辅助系统)。我们还需要适当的传感器来探测可能出现的危险,这类传感器网络必须覆盖车身四周,同时提供适当的人机界面。
电子环车感应系统形成了许多驾驶员辅助系统的基础,这些系统会发出警告或主动进行干预。驾驶员辅助系统的目标之一是避免车辆发生正面碰撞,危险警告系统及主动刹车控制系统可以大幅较少这类事故,自适应巡航控制系统(ACC)是达成此目标的第一步。
系统组成
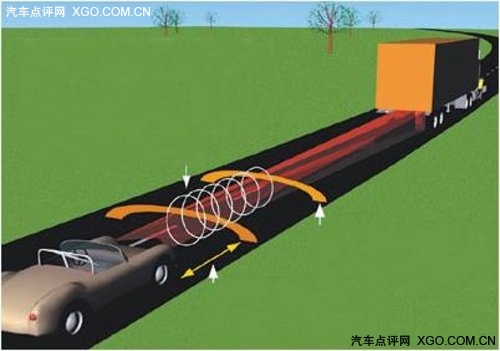
自适应巡航控制系统主要由车距传感器(雷达)、轮速传感器、转向角传感器以及ACC控制单元等组成。车距传感器一般安装在散热器格栅内或前保险杠的内侧,它可以探测到汽车前方200 m左右的距离;在前后车轮上装有轮速传感器(与ABS系统共用),可以感知车辆的行驶速度;转向角传感器用来判断车辆行驶的方向;ACC控制单元采集各个传感器的信号并进行计算,以便可以适时地与发动机控制单元和制动防抱死控制单元交换数据。
工作原理
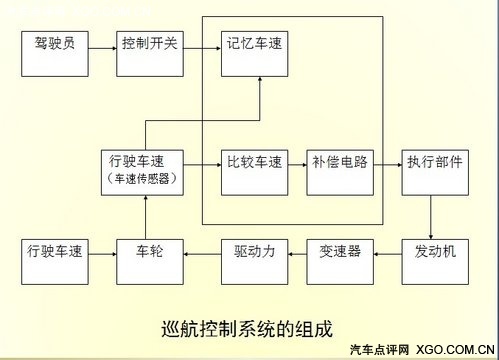
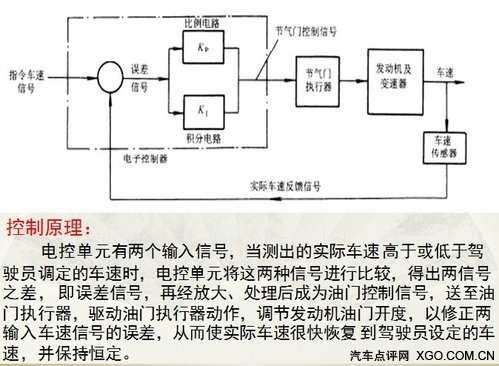
自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
车距传感器
虽然自适应巡航控制系统可以自动控制车速,但在任何时候驾驶者都可以主动进行加速或制动。当驾驶者在巡航控制状态下进行制动后,ACC控制单元就会终止巡航控制;当驾驶者在巡航控制状态下进行加速,停止加速后,ACC控制单元会按照原来设定的车速进行巡航控制。
系统扩展功能
通过软件升级和增加少量电子装置等方法,自适应巡航控制系统无需增加更多的装置即可实现车辆的智能驾驶等多项扩展功能。
(1)通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板(图3)感知的驾驶者施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶者的疲劳。

反馈式加速踏板
(2)自适应巡航控制系统一般在车速大于25 km/h时才会起作用,而当车速降低到25 km/h以下时,就需要驾驶者进行人工控制。通过系统软件的升级,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。自适应巡航控制系统的这种扩展功能,可以使汽车在非常低的车速时也能与前车保持设定的距离。当前方车辆起步后,自适应巡航控制系统会提醒驾驶者,驾驶者通过踩油门踏板或按下按钮发出信号,车辆就可以起步行驶。
(3)自适应巡航控制系统使车辆的编队行驶更加轻松。ACC控制单元可以设定自动跟踪的车辆,当本车跟随前车行驶时,ACC控制单元可以将车速调整为与前车相同,同时保持稳定的车距,而且这个距离可以通过转向盘附近的控制杆上的设置按钮进行选择。
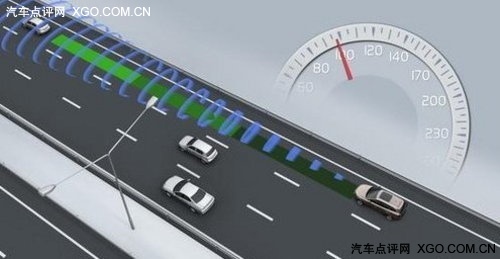
车距传感器感应前车距离
结语:
当然,无论科技发展到什么程度,又或是电子系统多么的智能和人性化。在驾驶过程中,我们始终还是要以人为本,不能完全依赖于这些高科技产物,毕竟驾驶车辆的还是人,只有我们自己主观意识的提升安全意识,才能更高的降低事故发生的概率。电子系统是别人发明的,生命却是要自己去珍惜的。所以,当我们主动的去安全驾驶再配以不断进步的各项电子系统,才能让我们更平安的享受驾驶乐趣。
下一篇: PLC、DCS、FCS三大控
上一篇: 用于轮胎压力监测系统

型号:ML200PS1PC
价格:面议
库存:10
订货号:ML200PS1PC

型号:ABH200PSC1B
价格:面议
库存:10
订货号:ABH200PSC1B

型号:GLGD12D
价格:面议
库存:10
订货号:GLGD12D

型号:19C003PG1K
价格:¥8000
库存:10
订货号:19C003PG1K

型号:13C0500PA1K
价格:¥5500
库存:10
订货号:13C0500PA1K

型号:SPT4V5000PS5W10
价格:¥7500
库存:10
订货号:SPT4V5000PS5W10


