
发布日期:2022-08-21 点击率:37
最新的驾驶辅助系统(DAS)技术通过“传感器数据融合”,把来自不同信息源,如雷达、摄像头、全球导航卫星系统、路边基础设施及其他车辆信息的传感器数据结合起来,形成更全面的有关道路状况的报告,让车辆和道路更安全,而单个传感器很难实现这一功能。
图像合成
驾驶辅助系统(DAS)正得到越来越广泛的应用。无论是正在开发中的,还是已经量产的,最新的DAS系统可以帮助驾驶者更好地根据当时的路况来控制车辆。车载传感器可以探测车辆周围的环境,包括车道、障碍物,以及道路上的其他车辆。更先进的车载技术甚至可以通过安装在其他车辆上的远程传感器,以及道路两旁的基础设施来接收信息。
一般的车辆传感器通常只有某个特定用途。例如,雷达用于物体探测,超声波传感器用于停车监测,摄像头用于车道监测,每一个传感器只能提供环境的一部分信息。复杂的传感器数据融合技术结合了来自不同信息源的数据,从而形成一套全面的环境信息。传感器数据融合的优点包括:
1.提高测量精度,包括提高准确度、精密度、可靠性、降低错误/缺失检测率,并降低测量噪声;
2.扩大测量范围,例如,结合具有不同测量范围的传感器;
3.提高传感器探测车辆周围环境的鲁棒性;
4.通过传感器协同作用获得的额外数据,例如:一个传感器用来测量车辆与物体间的距离,另一个传感器用来测量相对速度,把两个传感器的数据结合起来,就可以获得车辆的抵达时间。
传感器数据融合需要高的处理速度和内存配置。通过更高规格的处理器、高效算法在软件和硬件中的运用,以及新的电路技术,电子储存和处理能力都得到了提高,这意味着可以实现批量生产。本文将介绍部分传感器的协同作用。
雷达传感器
用于汽车行业的雷达,根据其探测距离的不同可分为远程、中程和短程三大类。TRW专注于远程和中程雷达的研发,用于物体分类和路面信息探测。
1.远程雷达(76~77GHz)
汽车远程雷达的频率是76~77GHz,通常用来测量目标区域、相对速度和角位置。最大探测距离通常在180~250m之间,水平视野范围是12°左右(而16~18°正成为新的标准)。
TRW下一代远程雷达具有一个卡塞格伦天线,可以扩大视野范围,还有一个调频、频移键控调控技术(FMFSK)。该产品可用于碰撞预警系统,以加强对静止障碍物的探测。
2.中程雷达(24GHz)
TRW开发的24GHz中程雷达,最大探测距离达150m,有效控制距离100m,而且水平视野非常宽。该产品已经进行了成本优化,确保其可以应用到更多不同级别的车辆上。
该雷达还可以应用到碰撞预警系统、侧向“车道偏离辅助”和“盲点监测”系统中(注:24GHz雷达不受欧盟超宽带立法限制,该立法将于2013年生效,影响范围是工业、科学和医疗频段)。
3.视觉系统
视觉系统通常包含了摄像头、图像处理硬件,以及数据传输方法。摄像头用来捕捉可见光图像,从中提取“特征”。
视频图像处理是典型的计算密集型技术。然而,汽车功能的执行需要通过强大的处理电子的应用来实现,广泛应用的低成本照相机使得摄像系统的成本效益成为可能。TRW的车道监测就是这样一个系统,通过识别道路标识(例如:外车道上的人行道边线、分隔迎面驶来的车辆的栅栏),来推断车辆的位置、行驶方向,以及道路的弯曲度。这些信息用来警醒驾驶者发生车道偏离的可能,方式有声频警告(如蜂鸣)、视觉提示和触觉反馈(如可震动的方向盘)。
汽车传感器数据融合案例
充分利用数据融合的前置雷达和视觉系统,如今已经运用到量产车上。尽管在下文中没有明确说明,但其他几种传感器,如轮速传感器、偏航率传感器和横向加速度传感器,也能进行数据融合,进一步提高系统性能。
1.车道偏离辅助
车道偏离辅助需要探测车辆周围的环境,仅靠一个传感器来探测附近所有车辆的信息是不切实际的,因此需要一组传感器来覆盖所需的探测范围。TRW Conekt(TRW工程服务机构)在德国曼(MAN)商用车公司的一辆26t商用车上安装了一组传感器,用来参与德国汽车工业与道路研发项目INVENT。INVENT项目的目的是进行道路交通研究,以改进交通流并减少事故。这组传感器由两个TRW的77GHz雷达传感器、三个第三方24GHz传感器以及一个TRW车道摄像头监测系统组成(见图1)。
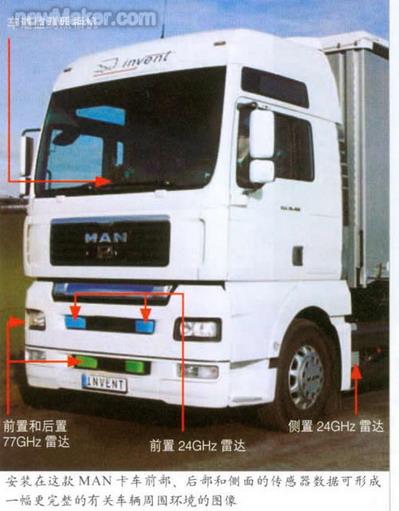
图1 通过传感器数据的融合来为车道偏离提供辅助
图2为该传感器组所能达到的探测范围。
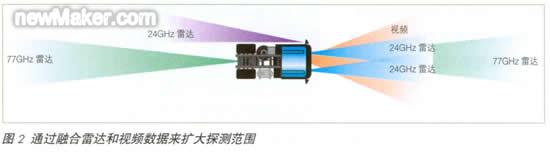
雷达能提供主车与其他车辆相对位置的信息。该雷达数据与来自车道视频监测系统的信息相融合,从而产生一个车辆相对于道路的位置图像。该信息可用于车道偏离或盲点辅助系统。
2.车道监测数据
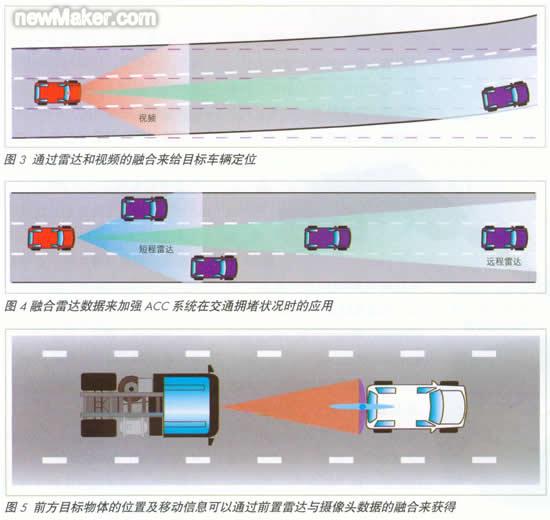
ACC系统可以获知主车是否与前方丰辆处于同一车道上。如果是,则主车的车速可能会放缓,以保持系统所设定的间距。系统可利用来自摄像头系统的车道监测数据,给道路上的其他车辆定位,从而决定主车是否保持与其他车辆的间距(见图3)。
3.ACC雷达融合
为了支持ACC系统的停-启功能(也称交通拥堵辅助功能),必须扩大车辆附近区域的物体监测范围。如图4所示,这可以通过一个远程雷达和一个具有宽阔视野的短程雷达的融合来实现。部分供应商通过使用短程雷达+远程雷达,或中程雷达+远程雷达来实现这个功能,但TRW的策略是通过结合雷达和视频传感器来实现。
4.物体探测
TRW的雷达传感器可用于精确的范围测量和视觉系统的角测量。通过融合技术把这些可互补的测量方法结合起来。这相比于单个传感器的工作,能够更精确地给目标物体定位。图5展示了TRW技术如何把雷达和视频数据进行融合,给前方车辆准确定位。车辆定位可用于碰撞预警和自动紧急制动。两个传感器独立工作,以确认物体的存在。
5.GNSS定位
ACC系统也可使用来自于车载导航系统的信息。车载导航系统结合了车载地图和全球导航卫星系统(GNSS)定位。然而,GNSS定位的精确性和有效性有时会比较差,尤其是在建筑物覆盖区。
若想提高车辆相对于车道的横向位置精度,可以把来自全球导航卫星系统与摄像头车道监测系统的信息进行融合。横向和纵向定位精度都可进一步提高,方法是匹配和比较视频图像特征及GNSS地图特征。这只是DAS利用基础设施信息系统的一个例子。
6.基础设施与车辆及车辆与车辆间的通信
基础设施与车辆、车辆与车辆间通信的技术进步,使得安装在车身外的传感器信息可以被充分利用,从而建立更完整的有关车辆周围环境及定位的图像(例如,通过GNSS系统)。事实上,这些通信技术的进步,也提供了更全面的环境信息,从而为早期预警和处理即将发生的问题提供帮助。
展望
除了雷达和视觉系统,其他传感器也可用于测量车辆特定的环境信息。例如,立体视觉、远红外线传感器、3D照相机和激光扫描仪都可用作环境传感器,为驾驶者提供帮助,避免或减少事故的严重程度。
另外,传感器数据的融合也使得DAS系统能够为保护环境做贡献。例如,通过传感器数据融合推断出来的一些道路环境的细节信息(比如斜坡),可用于调节发动机管理系统及自动变速器的运转,从而获得更好的燃油经济性。这一点对混合动力传动系统尤为有用。(end)
下一篇: PLC、DCS、FCS三大控
上一篇: 传感器与转换器谁匹配

型号:ML200PS1PC
价格:面议
库存:10
订货号:ML200PS1PC

型号:ABH200PSC1B
价格:面议
库存:10
订货号:ABH200PSC1B

型号:GLGD12D
价格:面议
库存:10
订货号:GLGD12D

型号:19C003PG1K
价格:¥8000
库存:10
订货号:19C003PG1K

型号:13C0500PA1K
价格:¥5500
库存:10
订货号:13C0500PA1K

型号:SPT4V5000PS5W10
价格:¥7500
库存:10
订货号:SPT4V5000PS5W10


