
发布日期:2022-08-21 点击率:44
摘 要:交通流量采集传感器在交通控制中起着极其重要的作用,它是交通控制系统中控制参数采集的主要工具,它为干线协调控制提供基础数据,是决定交通信号控制精度的主要部件。本文通过对干线交通的研究,研究了干线交通中交通流量采集传感器布局。首先,讨论了干线中测速对传感器在车道上布局的影响。其次,考虑传感器的采集可靠性,给出了干线不同车道上车流量之间的相似度估算公式,讨论车道上传感器利用率的情况。最后给出了干线交通流量采集传感器的优化布局的整体思路。
0 前言
交通问题现在已经成为世界很多城市所面对的问题,很多研究者都投身到交通工程研究中,以寻求更好的交通方案来解决现在所面对的交通拥堵、交通事故频发的问题。
同时,随着现代交通以及电子技术的发展,交通控制也得到了迅速地发展,已经由先前的手动控制系统转变为全自动的控制系统。此时为了提高交通控制的精度,以及对交通控制信号的很好配时和提高整个交通系统的运行效率,交通流量的采集就起着至关重要的作用。
对于交通流量的采集,早期人们是通过人工统计的方式进行的,通过对一时间段中经过路口的车辆数的统计,分析出交叉口车流量的大致规律,但是此种方式既耗费人力,又效率极低。于是人们就考虑了利用传感器来采集交通流量,如CCD摄像的采集、GPS探测器的采集、地感线圈的采集等等。这些传感器的采集提高了采集流量也提高了控制系统的精度,假如传感器布局合理,可以在提高整个交通控制系统性能的同时减少费用,从而提高交通控制的性能。在本文中是以地感线圈来研究传感器布局的。
1 干线中速度检测对传感器的布局影响
在干线交通中,交通流量采集传感器的布局合理与否决定着干线协调控制的实现。在干线中,为了对干线交通的信号配时,需要对干线的车流量q的采集,以及对车辆速度的检测。
由于在干线交通控制中,为了测量车辆的速度,要在车道的上游和下游都要考虑布置传感器。在此设干线两交叉口之间距离是L,车辆在直行的方向从启动到加速到匀速行驶一般会需要一段时间t的,同时,当车辆遇见红灯的时候也要减速行驶,也需要一段时间t,那么可知道要车辆出车子的行驶速度,在干线直行方向传感器的布置离交叉口必须要有一段距离S,可以通过经验统计值给出车辆的行驶速度v,同时设交叉口的宽度为d,那么可以得到加减速的路段距离S1为:
则有式(1)可知,要使传感器布置在干道的L-S1之内才能很好测量车辆的速度,同时布置在上游L-S1+d+s以内的干道中,如图1所示,在文献[1]中,一般情况下设置两个传感器之间的距离为5m左右,同时要使S>S1。
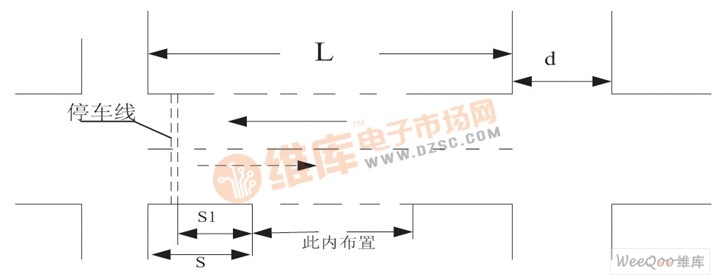
图1 传感器布置的范围。
2 干线中传感器的可靠性处理
由于车流量较大,当布置传感器时就要考虑传感器的可靠性,如一个车道的传感器损坏时,对此车道的车流量就无法采集。而此时我们就可以通过先前对每个车道的车流量采集数据进行分析,得到每个车道上的传感器的利用率和车道上车流量之间的相似度,进而可以通过利用率和相似度来进行传感器之间的融合处理。
依据文献[5]中对路段上车辆的转向比研究结果分析,可知干线路段上的车流量,在一定时间中是有一定的转向比的,在此假定左转、直行、右转的转向比为n1:n2:n3,一般情况下n2会大于n1和n3,此时,交通干线上此三个方向上的车流量相对来说就有一定的比例关系。由此可以知道三个方向的车道上传感器利用率就有很大不同。
2.1 车道中传感器的利用率
在主干线上,根据实际经验及文献[5]中对实际交通流量采集得到的数据,并对转向比的分析,可知每个车道上的传感器使用次数相对于车道而言可以看作是一个分段函数,可以表示为如图2所示的情况。图中的纵坐标 表示传感器在此车道上的平均使用次数,以此表示传感器的利用率。横坐标L表示车道分布,在O到L1是处在隔离带与左转车道之间,此距离一般很小,L1到L2之间是车辆左转的车道,L2到L3之间是车辆直行的车道,L3到L4之间表示车辆右转的车道。
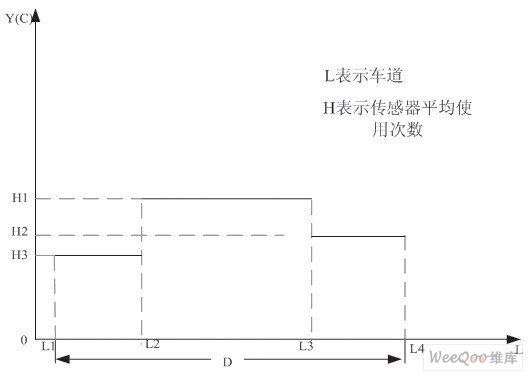
图2 传感器在干道的利用率
本文考虑一个左转车道,两个直行车道,一个右转车道,由图可知:
(1)在O到L1之间靠近隔离带处,车辆一般很少经过,此处的传感器利用率Y近似为零。
(2)在L1和L2之间为一个左转的车道,相对于直行的车流量来说,左转的车流量不是很大,传感器的利用率也不是很高。
(3)对于行车的干线中央处也就是直行的两个车道L2到L3之间,由于车流量较大,传感器的平均利用率最高。
(4)L3和L4之间是一个右转的车道,因为在此交叉口处不管是遇见红灯还是绿灯,一般情况下此车道都是允许车辆通行的,相对而言此车道的车流量就比左转车流量大而小于直行道的车流量。在这种情况下,传感器的平均利用率就如图所示,比直行的低而比左转的要高。
由以上的讨论分析,可知干线车道与传感器利用率之间的关系,可以近似地用式(2)表示:
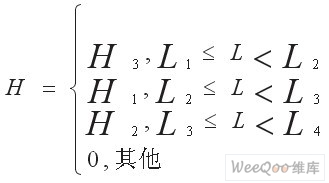
综合以上的讨论,并由式(2)可知,干线中在左转、直行和右转车道的交通流量采集传感器利用率是很大不同的,其中直行的车道上较大。因此直行方向上传感器损坏的可能性也相对较大,为保证传感器准确地采集车流量,就要对车道上车流量的相似度进行讨论。
2.2 车道之间交通流量的相似度
由2.1节的讨论,可知不同车道上传感器的利用率是有很大不同的,那么为了保证干线上车流量采集没有误差,在其中一车道上传感器损坏的情况下我们考虑是不是可以通过相邻的传感器得到的数据来近似地给出此车道上交通参数呢?此时我们就需要考虑车道之间的车流量的相似度。
对于本文中所讨论的干线车道,可表示如图3所示,图中,1表示左转的车道,2和3表示直行的车道,4表示右转的车道。为了得到车道之间的车流量的相似度,我们首先要对车流量进行检测,在此假设没有布置地感线圈之前,我们可先利用CCD摄像来采集交通流量。
图3 车道的描述对于干线,每天的交通流量一般情况下是保持在一定的范围,即可以表示为 ,于是我们可以采集一天的交通流量数据来进行估算。
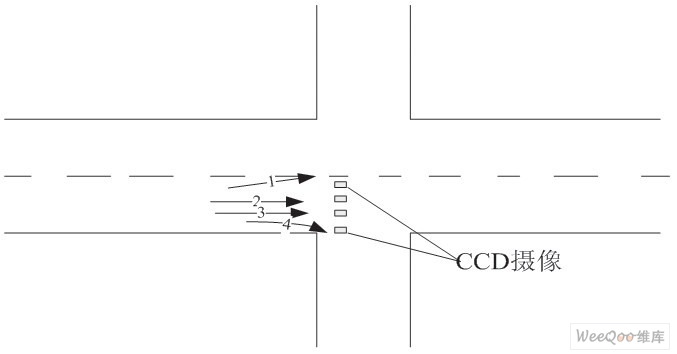
图3 车道的描述
由图1规定的车道,此时首先通过CCD摄像可以分别测出其在每一时间段中的三个车道的车流量。在此假设采集到车道1的车流量为Xi,车道2的车流量Yi,车道3的车流量为Zi,车道4的车流量为Wi其中i=1,2,…,n,n为所取的时间段数。那么可以分别求出这四个车道的车流量相似度为:ρ12、ρ13、ρ14、ρ23、ρ24、ρ34,此个相似度可表示为如下:

其中 分别为三个车道的每个时间段的车流量的总和,E(X)、E(Y)、E(Z)、E(W)分别为X、Y、Z、W的数学期望,代表车道上车流量的平均值。E(XY)、E(XZ)、E(XW)、E(YZ)、E(YW)、E(ZW)分别为车流量两两乘积的期望,σX、σY、σZ、σW分别为四个车道上车流量的标准差,由此可以得到在不同车道上的车流量之间的相似度程度,为传感器可靠性分析和传感器融合提供前提。
分别为三个车道的每个时间段的车流量的总和,E(X)、E(Y)、E(Z)、E(W)分别为X、Y、Z、W的数学期望,代表车道上车流量的平均值。E(XY)、E(XZ)、E(XW)、E(YZ)、E(YW)、E(ZW)分别为车流量两两乘积的期望,σX、σY、σZ、σW分别为四个车道上车流量的标准差,由此可以得到在不同车道上的车流量之间的相似度程度,为传感器可靠性分析和传感器融合提供前提。
2.3 干线传感器可靠性与布局的分析
由于干线上不同车道的传感器的利用率是不同的,那么在布局传感器时就要考虑当有传感器的损坏时,怎么对其进行处理。此时就要考虑布局传感器时,在利用率较高的车道上加强传感器可靠性处理技术,以提高检测的准确性。于是2.2节分析了通过CCD摄像得到车道上的交通流量的相似度,当其中车道上利用率高的传感器损坏时,可能传感器得到的数据是错误的。那么我们就可以通过车道车流量相似度,利用其他的车道上传感器采集的车流量来近似得出此车道上的车流量,即此车道上的车流量可表示为:
其中i、j分别代表前文讨论的车道号(9)由式(9)可知,此车道上的车流量是可以通过相似度表示为其余车道上的函数。这样,我们可以在布局传感器时多考虑直行道上的传感器的融合性处理,为保证整个布局传感器采集的可靠性,来降低误差,提高精度,可表示为如图4所示。
图4 传感器可靠性分析经过这种处理,可以近似推算出有传感器损坏的车道上交通车流量q1,同时对于车道上的其他一些参数的估计也可以近似地用此估计出来,确保了干线上传感器采集的可靠性。
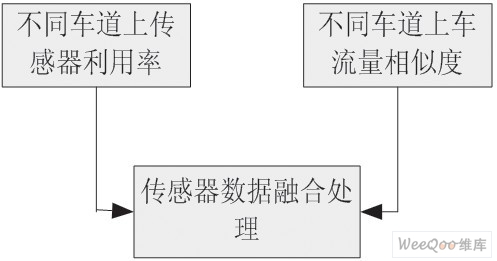
图4 传感器可靠性分析
3 交通流量采集传感器布局的总结
综合以上的讨论,分析传感器优化布局的整体思路可以描述为如图5所示,以此得到传感器的布局的合理性。
并且在保证流量采集精确的情况下,最大限度地降低传感器布局的消耗。
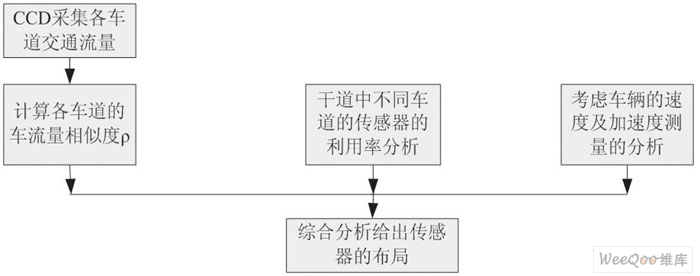
图5 传感器优化布局的整体思路。
4 结束语
本文依据现代交通的发展需求,以及交通控制的发展与改进,给出了干线交通中交通流量采集传感器优化布局的一些影响因素。首先在干线交通中,车道上的车速也是一个控制参数,为此要考虑合理布局传感器来测量车速度和加速度。然后考虑了提高传感器的可靠性,分析各车道车流量之间的相似度和传感器利用率,当流量采集传感器损坏时利用临近车道的传感器估计出此车道的车流量以及一些信号参数;最后由这些因素给出了传感器的合理布局整体思路。文章中对有些考虑因素的讨论可能还不是很全面合理,如传感器采集之间产生冲突交叉等会影响测量的准确性,这些都可归结对传感器融合处理的研究,同时对每种情况还需要具体做进一步研究验证,这些都还有待以后研究工作的深入。
参考文献:
[1] Klein L A.SeNSor technologies and data requirements forITS [M].Arrech House Boston & London,2001.
[2] Washington D.C.Transportation Research Board.[C].76thAnnual Meeting.1997.
[3] Ahmed S A,Hussain T M,Saadawi T N.Active and passiveinfrared sensors for vehicular traffic control[C]//IEEE44th Vehicular Technology Conference,New York,1994:1393-1397.
[4] Linauer M,Mrakotsky E.Method to generate floating cardata for use in traffic telematics systems[C].Nagoya:11thWorld Congress on ITS.2004.
[5] 尹宏宾,徐建闽.道路交通控制技术[M].广州:华南理工大学出版社.
[6] 张 航,田冬军,曾宪宝,等.城市道路交通检测器优化配置方法研究[J].武汉理工大学学报,2008,32(6):1161-1164.
[7] 王树欣,伍湘彬.地感线圈在交通控制领域中的应用[J].电子世界,2005(8):48.
[8] 伍建国,王 峰.城市道路交通数据采集系统检测器优化布点研究[J].公路交通科技,2004(2):90-93,100.
[9] 韦达利,陈 锋,卞 凯,等.基于数据融合的交通流量数据在线校正[J].中南大学学报(自然科学版),2009,40(S1):344-349.
[10] 姜桂艳.道路交通状态判别技术与应用[M].北京:人民交通出版社,2004.
下一篇: PLC、DCS、FCS三大控
上一篇: 基于无线传感器网络节

型号:ML200PS1PC
价格:面议
库存:10
订货号:ML200PS1PC

型号:ABH200PSC1B
价格:面议
库存:10
订货号:ABH200PSC1B

型号:GLGD12D
价格:面议
库存:10
订货号:GLGD12D

型号:19C003PG1K
价格:¥8000
库存:10
订货号:19C003PG1K

型号:13C0500PA1K
价格:¥5500
库存:10
订货号:13C0500PA1K

型号:SPT4V5000PS5W10
价格:¥7500
库存:10
订货号:SPT4V5000PS5W10


