一、室内定位技术有哪几种?
室内定位技术在过去的数年间正在诸多行业得到越来越广泛的应用,在我们日常生活中扮演着越来越重要的角色。
过去三十年间,以GPS为代表的全球卫星导航系统重塑了人类生活,成为现代社会的一个重要技术里程碑。从地图导航到社交网络,位置服务都在其中发挥关键作用。另一方面,随着我国城市化进程的推进,城市的面貌正在发生深刻的改变。
越来越多的摩天大楼、购物商场、交通枢纽、体育场馆、医疗中心正在成为城市新地标。这些现代化的大型建筑,无一例外,都拥有巨量的室内空间。
智能手机及其他无线设备的普遍使用,更是直接引爆了对室内位置数据的市场需求。然而,由于非视线通信问题,GPS无法在室内条件下提供可靠的位置数据。因此,室内定位技术正在成为学术研究和行业应用的热点领域。
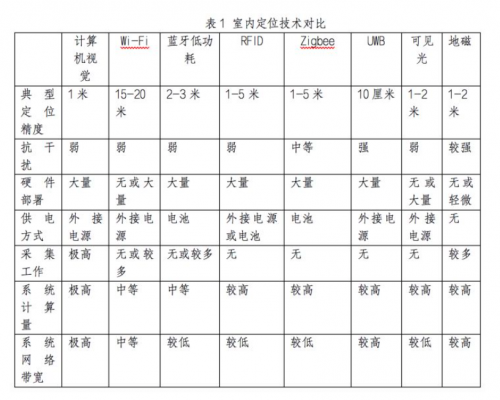
商用室内定位系统依据其所依托的定位技术一般可以分为四类,以计算机视觉技术为基础的室内定位系统、以无线通讯技术为基础的室内定位系统、以LED可见光技术为基础的室内定位系统和以地磁匹配为基础的室内定位技术。
不同室内定位技术的对比及优缺点如表1。要实现商业场景下可以落地的高精度室内定位系统,不仅仅取决于某种技术本身的定位精度,更要综合考虑环境、施工、部署、推广等等因素。
基于计算机视觉的室内定位系统,通过计算机视觉算法,利用定位过程中摄像头拍摄到的图像信息与预先采集的定位场馆的视觉照片数据库做比对,从而确定人员的位置坐标。
随着近几年人工智能技术的飞速发展,基于计算机视觉的室内定位系统精度有很大提升,一般在1到2米。其缺点较为明显:如果是基于移动智能设备的主动定位,那么要求行人在定位过程中始终打开摄像头;如果是被动定位,那么需要预先在场馆内安装大量高清摄像头,工程造价较高。
无线电波通讯技术也可以用于构建室内定位系统,常见的Wi-Fi、蓝牙低功耗、RFID、UWB、Zigbee都属于这类。
Wi-Fi
室内的Wi-Fi网络不仅可以作为一般网络基础设施,也可以利用其空间传播的路径损耗效应(pathloss)建立路径损耗模型,从而实现位置数据的解算。
其优点是可以利用室内已经部署的Wi-Fi路由设备,无需额外部署。但是,如果场馆本身没有Wi-Fi设备,就需要额外部署。
其缺点是由于室内空间结构比较复杂,无线电波在室内空间传播过程中还存在阴影效应(shadowing)和多路传播效应(multipath),无论是模型法还是指纹法,都很难建立能够真实反映室内空间的传播模型。
因此,商用Wi-Fi室内定位系统的定位精度一般在15米到25米左右,具体依赖于室内已有的Wi-Fi设备数量及分布。
蓝牙
分别由苹果公司推出的iBeacon协议及谷歌公司推出的Eddystone协议是蓝牙低功耗技术在室内定位领域的代表。
其定位原理与Wi-Fi技术类似,优点是蓝牙低功耗设备功耗较低,无需额外供电,仅依靠纽扣电池即可。一般的智能手机也都拥有蓝牙扫描的能力。其缺点是,要达到1-2米的定位精度需要在室内部署大量的beacon设备。
RFID
RFID即射频识别技术,利用射频信号的电磁传输特性在射频标签及射频阅读器之间实现数据通信。
其优点是数据传输速率较高、安全性好,且不受非视线通信问题困扰。
其缺点是,需要在定位区域部署大量的RFID设备,且需要定位人员手持RFID标签,因此,在室内定位领域没有得到大规模商业推广。
UWB
UWB即超广波技术,可以在较低功耗的条件下于1纳秒内发送超过500MHz带宽的脉冲信号,主要用于短距通信领域。
其优点是,由于其特殊的信号类型及频谱,相对于其他无线电波信号,UWB信号在复杂的室内环境下不受多路效应的影响,并具有极佳的障碍物穿透能力,定位精度可以达到10cm级别。
但是,UWB技术标准的制定发展较为缓慢,因此其并未推广到消费电子领域,普通的移动智能设备并不支持UWB协议,仅用于少数要求较高的特殊工业场景。
此外,基于UWB技术的室内定位系统的搭建需要极高的硬件花费和部署成本
Zigbee
Zigbee技术基于IEEE 802.15.4协议,主要用于低成本、低数据传输、低功耗的无线传感器网络领域。一般商业领域的绝大多数用户智能设备并不支持这一协议,因此在商业室内定位领域内应用不多。
LED光
可见光通信技术利用LED光源发出的高频闪烁信号来编码LED发射源的位置坐标信息,感光传感器将接收到的可见光信号解码并计算出移动设备的位置信息。
其优点是可以依托室内已经部署的LED灯光,且不受无线电波干扰的影响。其缺点是,要求LED灯光具备闪烁编码功能,并且会由于非视线通信问题造成定位精度急剧下降。
地磁
基于地磁的室内定位技术是近几年逐渐在商业场景落地的一种新型定位技术。地球磁场是无处不在的,地球上任何一点的地磁场数据可以根据国际地磁和高空大气物理协会(IAGA)发布的国际地磁参考场模型(IGRF)和地点经纬度信息计算得出。
在钢筋水泥混凝土的建筑物结构内,地磁场曲线受到铁元素磁化后的影响而发生扭曲。这种扭曲只与室内空间的相对位置相关,从而形成独特的地磁指纹特征。
如果预先采集室内地磁指纹特征并生成地磁指纹数据库,那么就可以在定位时通过地磁数据信号解算出室内位置。
其优点是,地磁信号不存在非视线通信问题,也没有无线电波的阴影效应及多路效应等的干扰,只要室内空间结构保持大体不变,地磁信号就是相对稳定的。其缺点是,并非所有室内位置的地磁指纹特征具备较强的特异性,因此会有相似特征的问题,这就对算法的特征提取能力和鲁棒性提出了更高的要求。通常情况下,当地磁指纹特异性不足时,可以通过融合其他室内定位技术的方式提高算法整体的收敛性。
二、蓝牙AoX定位原理
原理上无线信号都可以用来定位,可以使用不同的定位技术,所以我们看到目前市场上有多种基于不同无线协议的,以及基于不同定位原理的解决方案。我们在公众号往期相关的短文中有过介绍,这里再简单介绍一下。
基于信号强度的定位RSSI
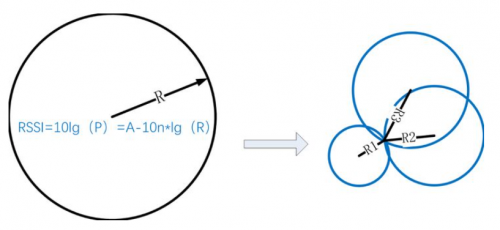
因为无线信号遵循一定的衰减规律,所以利用发射源到被测地点信号的衰减程度就可以计算得到被测物体到信号源之间的距离。可以参考如下的公式:
RSSI=10lg(P)=A-10n*lg(R)
其中P是距离R时的信号接收强度,A是信号在一米远时的接受信号强度,n是传输因子,那么被测位置R就可以计算出来。如果有平面上有3个信号源,那么根据三点定位的原理就可以计算出被测物体的具体位置了。
由于无线信号在环境中有非常多的干扰,所以这种测距的方法一般只能精确到几米的距离。
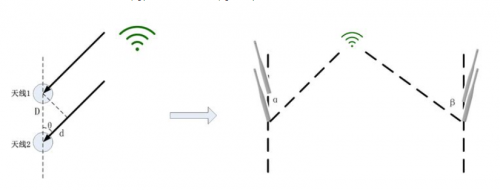
基于角度的定位AoA,AoD
我们就基于AoA介绍一下原理。电磁波具有不同的波长,一个2.4G的无线信号的波长大概是125mm,那么两个相距60mm的天线接收到的信号就相差半个波长,也就是相位相差180度。
根据信号到达不同天线的相位差,以及两个天线之间的距离,就可以测算出信号源同两个天线之间的夹角,这里假设到达天线的波前为理想的平面波。为了测量到这个相位差,两根天线就必须根据一定的时间规范进行切换,这就是AoA的基本原理。同理,如果有两组位于不同基站的天线分别检测到了信号源到基站的夹角,那么从平面的角度看,信号源就可以被定位了。
当然了,这只是原理,现实中为了消除无线信号的多径,折射,极化,信号噪声等各种干扰,天线和算法的实现是很复杂的。
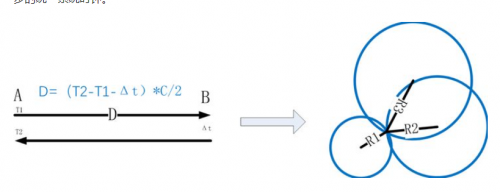
基于时间的定位TDOA ,TOA(ToF)
到达时间差测距法(TDOA),是根据一个无线电波从发送到接收之间的时间差计算二者之间的距离。如图A到B,可以在AB时钟严格同步的情况下用A到B的时间乘以光速就得到二者之间的距离。信号到不同的参考基站有不同的时间,意味着不同的距离,这样也就可以测算出具体位置。这种方案需要基站时间严格同步,但信号源复杂度低。
到达时间测距法(ToA)也可以让B把信号重新发回A,这样二者之间的时间差,减去B的时间开销,就也能算出AB之间的距离。同样,利用三角定位的原理就可以定位出信号源同不同基站之间的距离,从而达到定位的目的。这种方案下,信号源的复杂度稍微就高了一些,好处是不用非常同步的统一系统时钟。
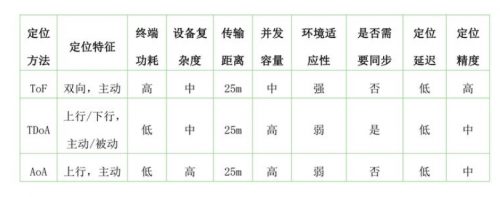
下图简单的对比了一下不同定位原理的相对特性(来自中国移动《室内定位白皮书》),不过具体的实现中的实际差别需要根据具体的解决方案确定。
蓝牙采用AoA,AoD的定位原理
在蓝牙定位解决方案中,Q公司是相对来说应用比较广泛的,这跟他在该领域的积累时间有很大关系。早期在蓝牙5.1标准出来之前,Q公司就利用蓝牙4.0做AoA的定位系统,该系统要求4.0蓝牙芯片能够按照Q公司的要求发出一组用于定位的pattern,而Q公司的基站将根据这一pattern实现AoA定位。
在蓝牙5.1的标准发布以后,国际厂商陆陆续续发布芯片的消息。但截止今天,还没有商业的基于5.1芯片的商用定位系统问世。Q公司协同N,S公司预计将在2020年底发布相关的解决方案。