
发布日期:2022-10-09 点击率:97
0 引言
数控技术和数控装备是工业现代化的基础,它直接影响着一个国家的经济实力和综合国力,近年来,随着数控技术的不断发展,基于工业以太网技术的运动控制技术在一些机电一体化设备中得到了很广泛的应用。Ether CAT(Ethernet for Control Automation Technology)技术,也就是以太网现场总线技术,是德国BECKHOFF公司提出的实时工业以太网技术,它具有通信速度快,数据量大,配置简单等众多优点,在当前很多工业控制领域得到了很广泛的应用。本文基于Ether CAT技术,对永磁伺服电机的控制器进行了一定的研究。
当前,随着生产现场的各运动设备的输入和输出节点不断增多,并且,各个设备的运动都要有生产现场总控计算机来控制管理,生产设备上电机数量不断增多,控制要求不但提高,当前普遍采用的方法是通过计算机进行远程控制,而对于一些局部的或者是固定的运动参数,则由现场的设备进行独立的控制,因此,该系统利用Ether CAT进行设计,可以很好的满足系统整体上的稳定性和局部的实时性要求。
1 系统总体架构
基于Ether CAT的永磁伺服电机控制器系统采用主从式的结构,其总体结构如图1所示:
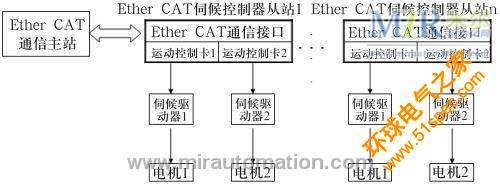
图1 基于Ether CAT的永磁伺服电机控制器系统结构图
如图1所示,该系统由一个Ether CAT通信主站和若干个Ether CAT伺服控制从站组成,主站与各个从站之间通过Ether CAT进行连接,Ether CAT伺服控制从站的基础是一块控制地板,在控制底板上安装有Ether CAT通信接口模块,用于与主站和各个从站之间进行通信,另外,底板上还有两个运动控制卡,而且,根据需要,可以在该底板上扩展更多的运动控制卡,通过每个运动控制卡控制一个伺服电机的运动。Ether CAT的控制底板采用Atmega128芯片作为它的控制芯片,而运动控制卡采用的是多功能的位置控制卡,可以很好的完成速度闭环控制、位置闭环控制等多个方面的工作。很好的满足了本系统的要求。
2 系统通信
Ether CAT的通信方式相对于其他以太网和现场总线有了很大的区别,在帧的处理方式上,它突破了其他以太网解决方案的限制,为了满足系统的需求,本系统在设计过程中,在应用层对Ether CAT的数据模块结构进行了重新定义的过程。一般来说,数据模块从总体上可以分成两类,包括指令数据和状态数据。这两种数据模块各有其不同的功能,在传输方式上也有一定的区别,指令数据的传送方向是从Ether CAT通信主站到Ether CAT伺服控制器从站,用来通过控制器从站对伺服电机的运动进行控制,而状态数据的传送方向是从Ether CAT伺服控制器从站到Ether CAT通信主站,首先,主站通过Ether CAT对从站发送一定的命令,由从站发出相应的状态数据,然后,由通信主站进行读取,从而主站可以得到相应的伺服电机的状态反馈。本系统中,每个运动控制卡都使用一个指令数据模块和一个状态数据模块。而在指令数据和状态数据传送的过程中,处于Ether CAT网络上的每个子报文都由各个Ether CAT从站上的所有的运动控制卡上的数据组成。
通信子报文的结构如表1所示:
表1 通信子报文结构

通信子报文中,首先是固定的报文头部分,然后是每个Ether CAT从站上的每个运动控制卡上的指令数据和状态数据。其中每个数据部分由十个字节构成,包含两个字节的数据模块头部分,两个字节的控制字/状态字部分,用来区分该部分是状态数据还是指令数据,最后是六个字节的指令数据区或状态数据区。数据模块的结构如图2所示。
![]()
图2 数据模块结构示意图
在以上数据模块结构中,每个数据模块头占用两个字节的空间,数据模块头中的内容包括运动控制卡的地址(4个位),工作方式(3位),握手位(1位)三个方面的信息。
利用以上通信报文结构,Ether CAT通信主站和从站之间通过进行周期性的通信过程来完成永磁伺服电机的控制过程。在通信过程中,通讯都是由主站发起的,两个从站之间要进行通信,必须要通过主站进行,把主站当做一个路由器。主站和伺服电机控制从站之间的通信时序如图3所示:
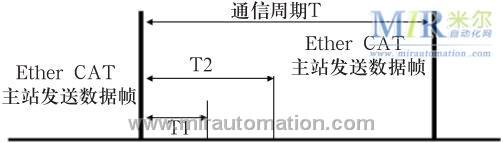
图3 基于Ether CAT的伺服电机控制器通信时序图
首先,Ether CAT通信主站根据相应的设置和命令发出数据帧,然后,伺服控制从站在T1之前读取指令数据的内容,并从报文中分析寻址到本机的报文,读取相应的控制命令,经过一定的运算之后,传送到对应的运动控制卡模块中从而对永磁式伺服电机进行相应的控制。
3 结束语
当前,基于现场总线网络的伺服运动控制系统因为它的可靠性、快速性和稳定性等种种优点成为当前伺服控制系统的发展趋势。本文针对基于Ether CAT的永磁伺服电机控制器进行了一定程度研究。在应用层对数据传输的子报文结构进行了相关的设计,经过实际验证,能够很好的满足系统的要求。本文仅仅对系统的主要部件进行了一定的研究,对于该控制器运动控制方法上的多控制器以及大型运动控制系统的构成还需要更进一步的研究。
下一篇: PLC、DCS、FCS三大控
上一篇: 索尔维全系列Solef?PV

型号:M2D068-DF
价格:面议
库存:999
订货号:M2D068-DF


